

Street tree target recognition method based on vehicle 2D LiDAR point cloud data
A point cloud data and recognition method technology, applied in the field of target recognition, can solve problems such as reducing the amount of point cloud data and data redundancy, grid/voxel size selection and segmentation accuracy are difficult to balance, so as to improve efficiency and accuracy Recognition, the effect of small data redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] Preferred embodiments of the present invention will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the invention are shown in the drawings, it should be understood that the invention may be embodied in various forms and should not be limited to the embodiments set forth herein.
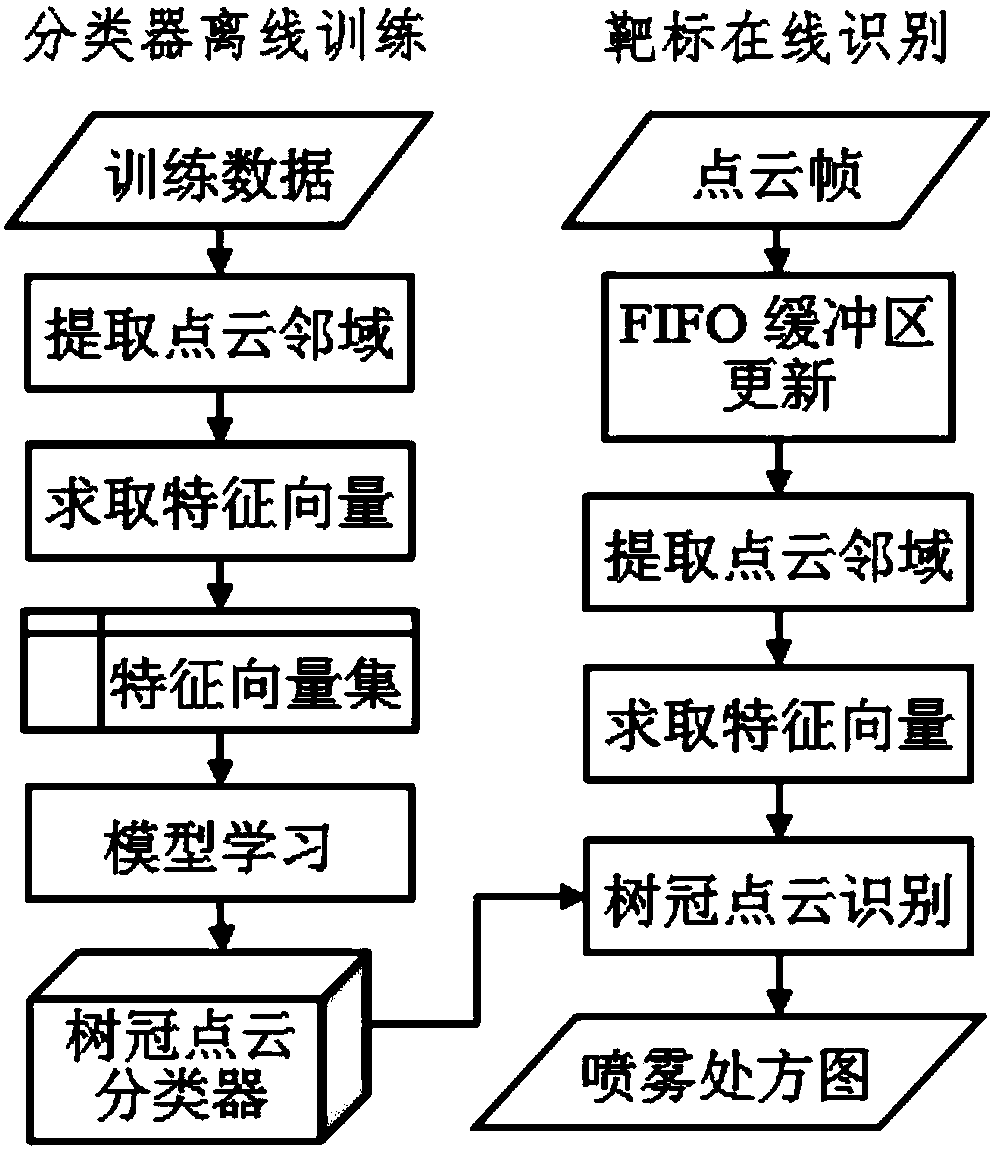
[0066] Such as figure 1 As shown, the present invention provides a kind of street tree target recognition method based on vehicle-mounted 2D LiDAR point cloud data, comprises the following steps:
[0067] Step 1: Use the vehicle-mounted 2D LiDAR system to obtain street data, save it as a point cloud file, and label the point cloud file with tree crowns and non-tree crowns;
[0068] Step 2: Construct a variable-scale grid, and extract a three-dimensional spherical domain from the variable-scale grid;
[0069] Step 3: Calculate the point cloud feature vector in the three-dimensional sphere to obtain the point cloud feature vector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More