

Robot small-line-segment proactive planning method based on position and posture restraint
A robot and small line segment technology, applied in the direction of electrical program control, digital control, etc., can solve the problems of low running speed at the end, unconsidered changes in the attitude of the end coordinate system, and failure to meet requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0094] In the following, the present invention will be further described in conjunction with the embodiments.
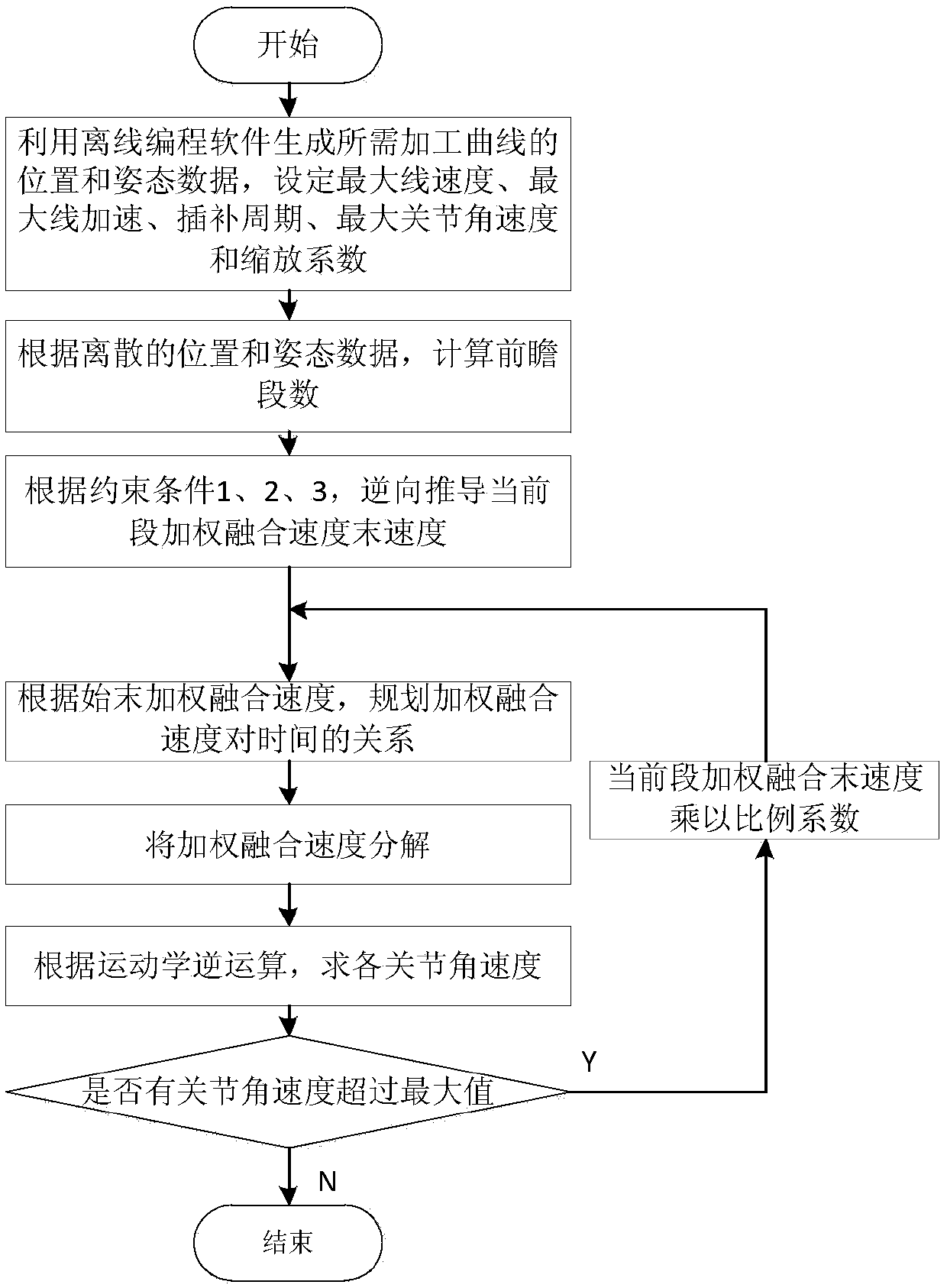
[0095] Combine figure 1 , The present invention includes the following steps:
[0096] (1) Use offline programming software to generate discrete position and posture data of the robot end coordinate system according to the trajectory path that the robot needs to move, and then obtain the fusion path length L of each segment i
[0097] (2) Determine the number of forward-looking segments n
[0098] (3) For any current segment i, if the number of forward-looking segments n is known, then k=i+n segment end weighted fusion velocity V e i+n =0, then determine the weighted fusion speed V at the end of the current i-th segment e i
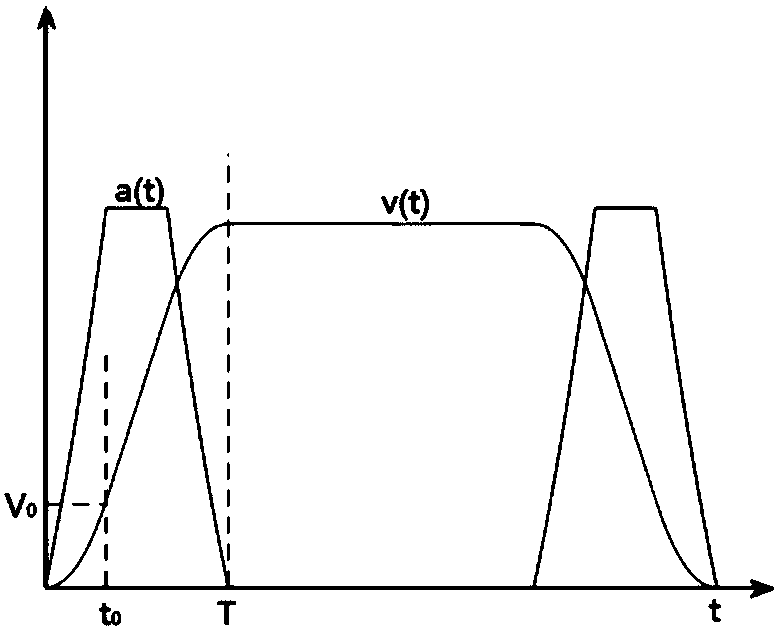
[0099] (4) According to Plan the relationship between the weighted fusion speed V(t) and time t of the current segment, divided into 6 cases
[0100] (5) Process the weighted fusion speed V(t) to obtain the weighted fusion speed vector It should be not...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More