

Robot multi-source shortest path planning method based on territorial limitation
A shortest path and area-limited technology, applied in the field of mobile robots, can solve the problems of difficult estimation of the time complexity of the A* algorithm, low efficiency of multi-source path planning, repeated calculations, etc., to improve computing efficiency, real-time performance, and high stability , Implement high-precision effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
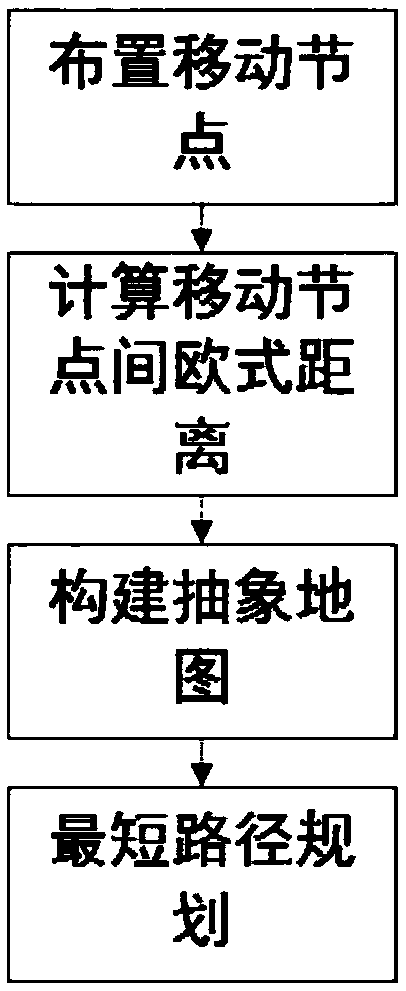
[0041] Specific as figure 1 shown, including the following steps:
[0042] (1) Arrangement of vertices in the visual graph: according to the actual work needs of the robot, artificially set a number of different mobile nodes in the working area of the robot in advance, and record the coordinates of each mobile node as the basis for this algorithm to find the shortest path, and ensure that the robot can By moving between the set mobile nodes to traverse the entire robot working route.
[0043] (2) Calculation of the connection weight between vertices: according to the coordinates of each mobile node, calculate the straight-line distance between any two mobile nodes, introduce the auxiliary vector D, and each component D[i][j] represents a certain mobile node v i to other mobile nodes v j The straight-line distance, where, if from v i to v j There is no traffic obstacle between them, then D[i][j] is v i to v j Straight-line distance, otherwise set D[i][j] to ∞. Thereby ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More