

Imaging device and method for generating 3D model
An imaging device and 3D technology, applied in image communication, stereo system, electrical components, etc., can solve the problems of weak anti-interference ability and easy distortion, and achieve the effect of convenient calculation, strong anti-interference ability and saving computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
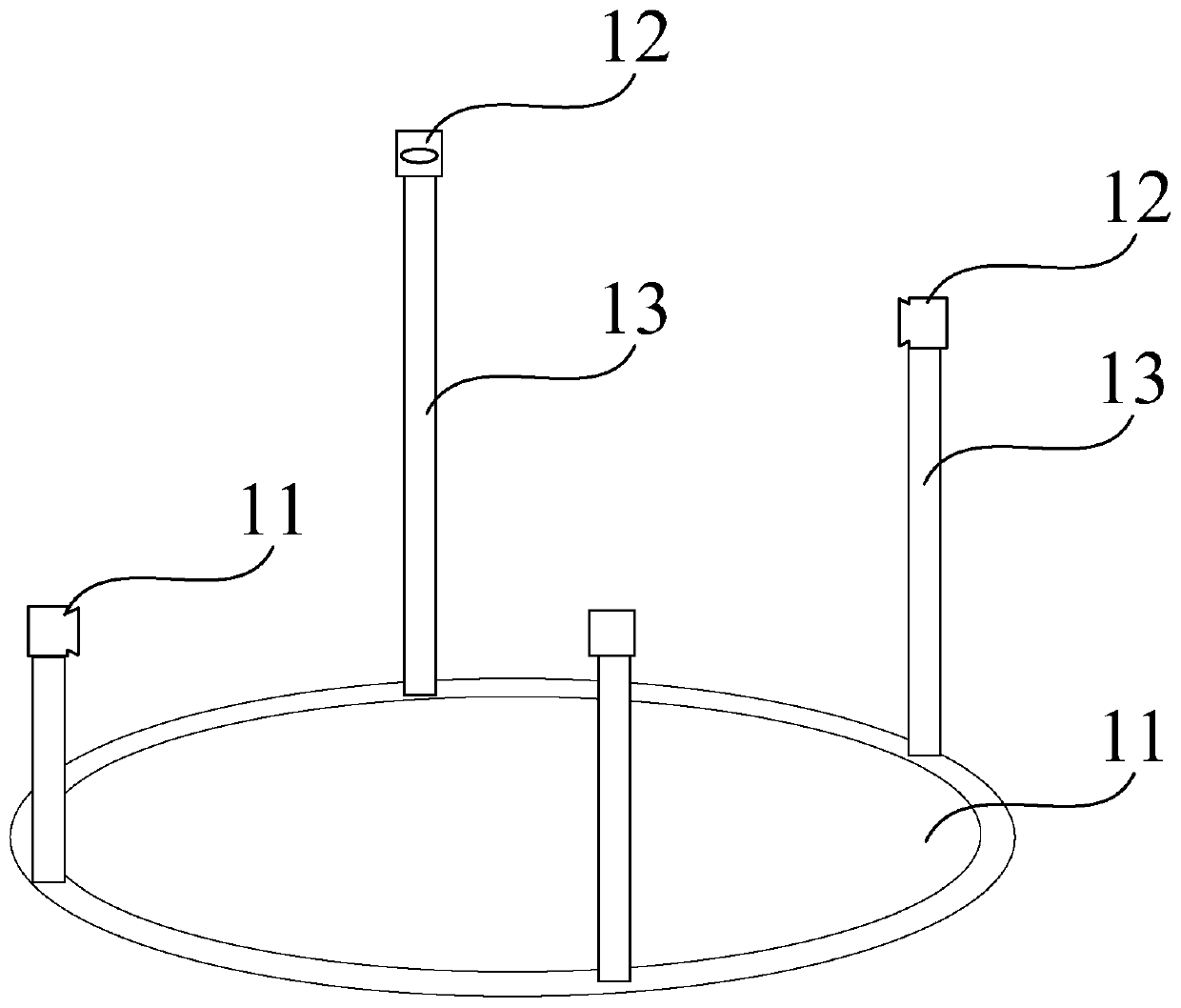
[0024] see figure 1 , this embodiment provides an imaging device for generating a 3D model, the imaging device includes a support part, a bottom surface 11 and four 3D cameras 12 .
[0025] The four 3D cameras are arranged on the support part along a preset track line, and the projection of the preset track line on the bottom surface is a circle.
[0026] The distance between any two 3D cameras to the bottom surface is only greater than zero, and the shooting direction of each 3D camera is parallel to the bottom surface and the shooting direction is a point from the 3D camera to the vertical line, and the vertical line is the point passing through the vertical line. The center of the circle and a straight line perpendicular to the bottom surface.
[0027] Specifically, the preset trajectory in this embodiment is a cylindrical helix, and the 3D cameras are uniformly arranged on the cylindrical helix.
[0028] The 4 3D cameras are evenly distributed on the preset trajectory li...
Embodiment 2
[0041] This embodiment is basically the same as Embodiment 1, the only difference is:
[0042] For a target 3D image acquired by a 3D camera, the processing end is used to select a feature point in the 3D image captured by the 3D camera and obtain the distance from the feature point to the vertical line and the included angle of the target;
[0043] Then obtain the position of the feature point in the 3D image shot by the adjacent 3D camera of the 3D camera through the lead of the preset trajectory line and the distance between the 3D cameras, and compare the 3D image shot by the 3D camera with the adjacent 3D image The 3D images shot by the 3D camera are stitched by the feature points, wherein the target angle is the angle between the line connecting the feature point to the vertical projection point and the plane where the 3D camera and the axis are located.
[0044] In this embodiment, feature points do not need to be identified, and directly selecting feature points can gr...
Embodiment 3
[0050] This embodiment is basically the same as Embodiment 1, the only difference is:
[0051] The preset trajectory is two cylindrical helixes, the starting points of the two cylindrical helixes are both set on the bottom surface, and the leads of the two cylindrical helixes are the same.
[0052] Example 2
[0053] This embodiment is basically the same as Embodiment 1, the only difference is:
[0054] The preset trajectory is three cylindrical helixes, the starting points of the three cylindrical helixes are all set on the bottom surface, and the leads of the three cylindrical helixes are the same.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More