

Robot dynamics modeling method based on deep learning
A dynamic modeling and deep learning technology, applied in the field of robot dynamic modeling based on deep learning, can solve the problems that the echo state characteristics cannot be fully satisfied, the output feedback connection is ignored, and the input signal characteristics are not fully considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
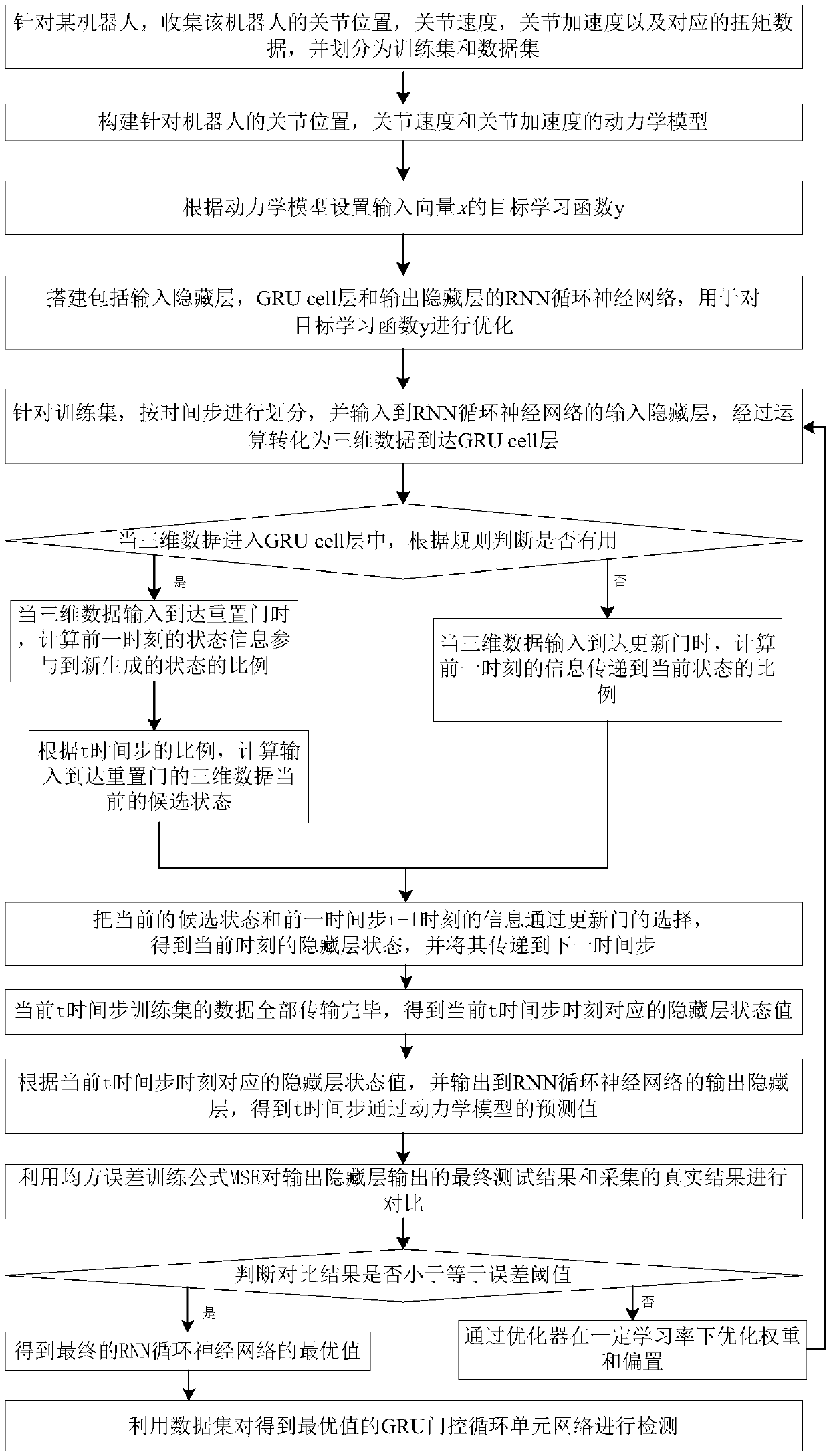
[0056] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
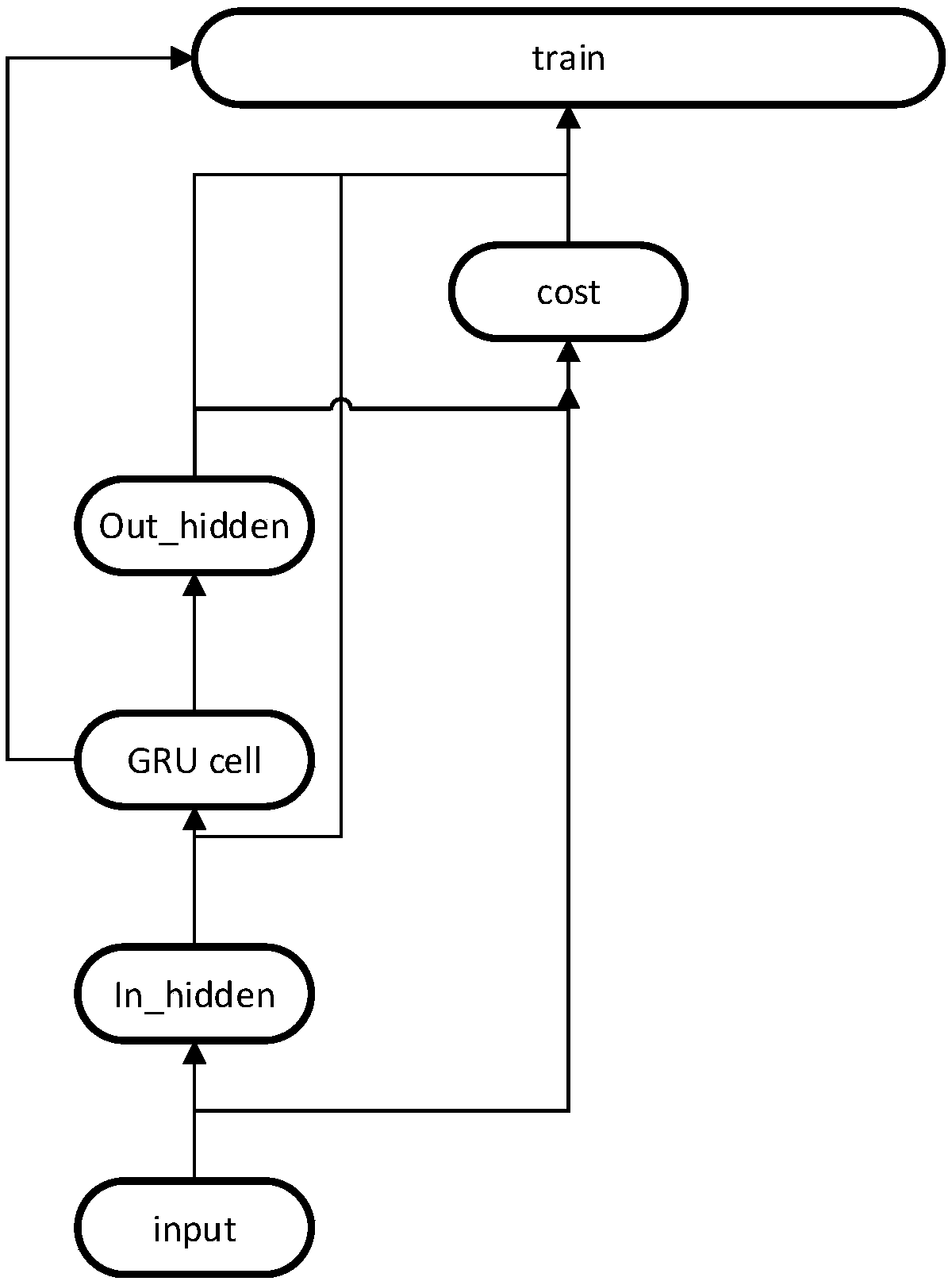
[0057] The invention provides a method for precise control of a robot dynamics model, which uses a deep learning method to model robot dynamics, and performs motion control and behavior prediction in the field of intelligent robots. In order to learn from long-term sequence data, the deep learning method based on GRU (GateRecurrent Unit gated recurrent unit) in RNN (Recurrent Neutral Network) is used to model the dynamics of the robot. Provides guarantee for accurate motion control of learning models. The position, velocity and acceleration of each joint are input at the input end of the RNN neural network model, and the torque of each joint is obtained at the output end, and the next action is predicted to improve the motion control accuracy of the robot.
[0058] Different from the traditional feedforward network (Feedforward ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More