

Transformer-substation wide-scale pointer type instrument automation identification method
An automatic identification and pointer-type technology, applied in character and pattern recognition, instruments, calculations, etc., can solve the problems of limited instrument and instrument panel recognition, the influence of accurate readings, and the low efficiency of the recognition process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to further illustrate the technical scheme of the present invention, the following will be combined with the attached Figure 2-5 Describe this program in detail.
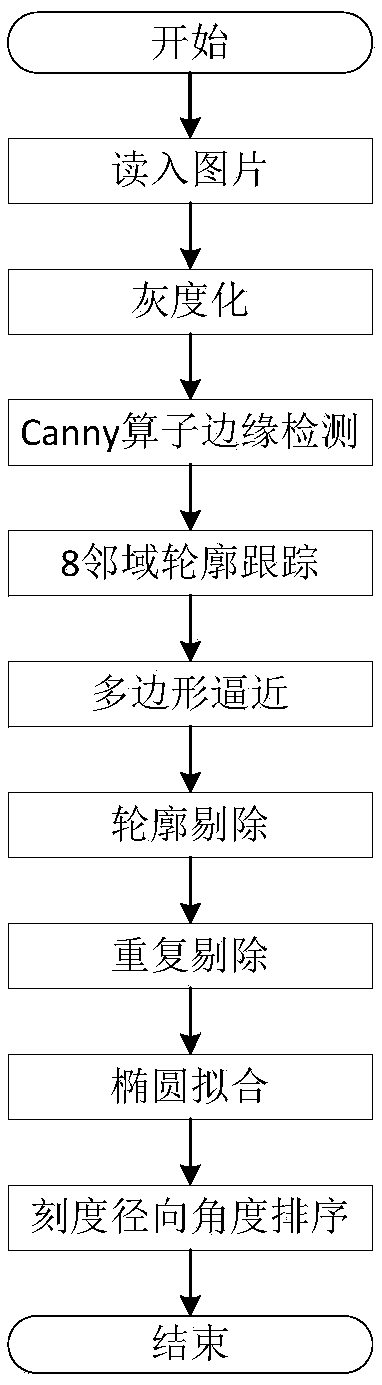
[0031] According to the substation wide-scale pointer instrument automatic recognition method implemented in the present invention, the specific embodiment is as follows figure 2 As shown, including the following processes:
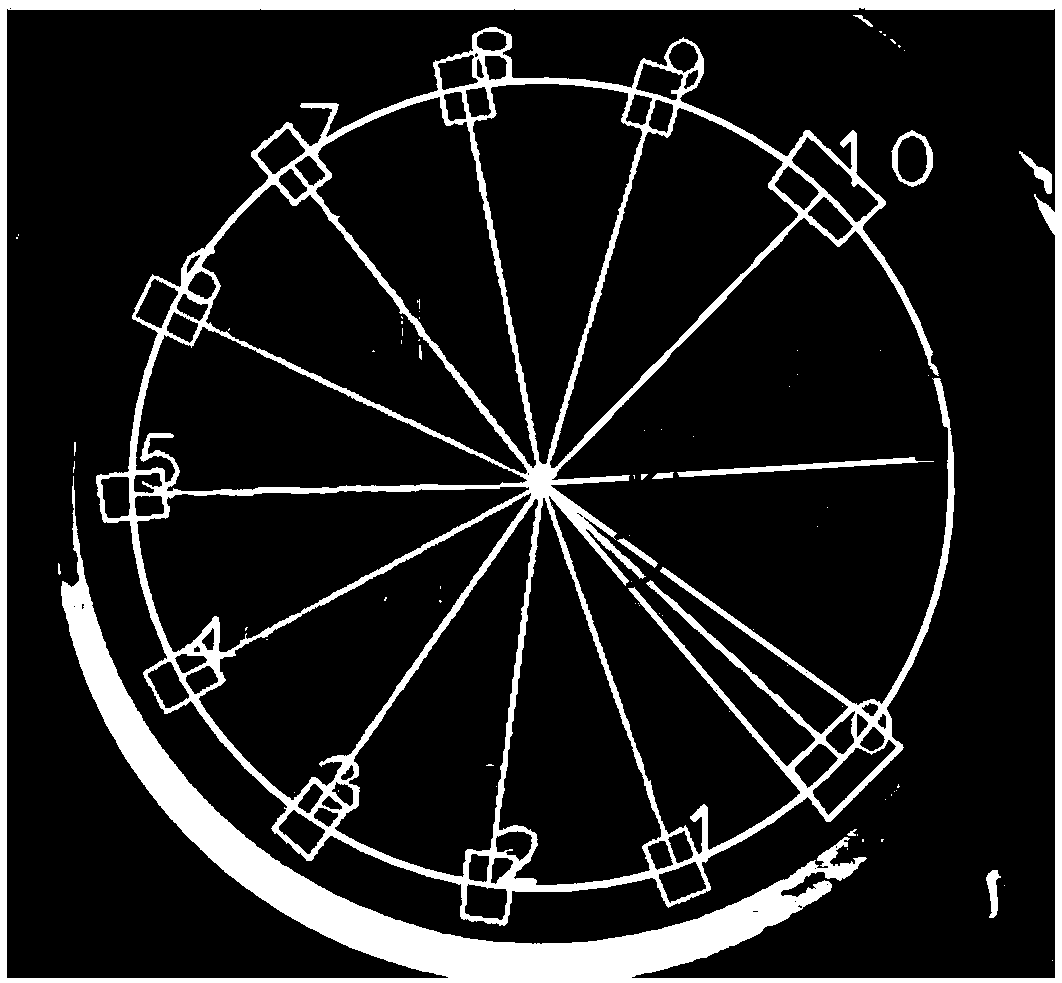
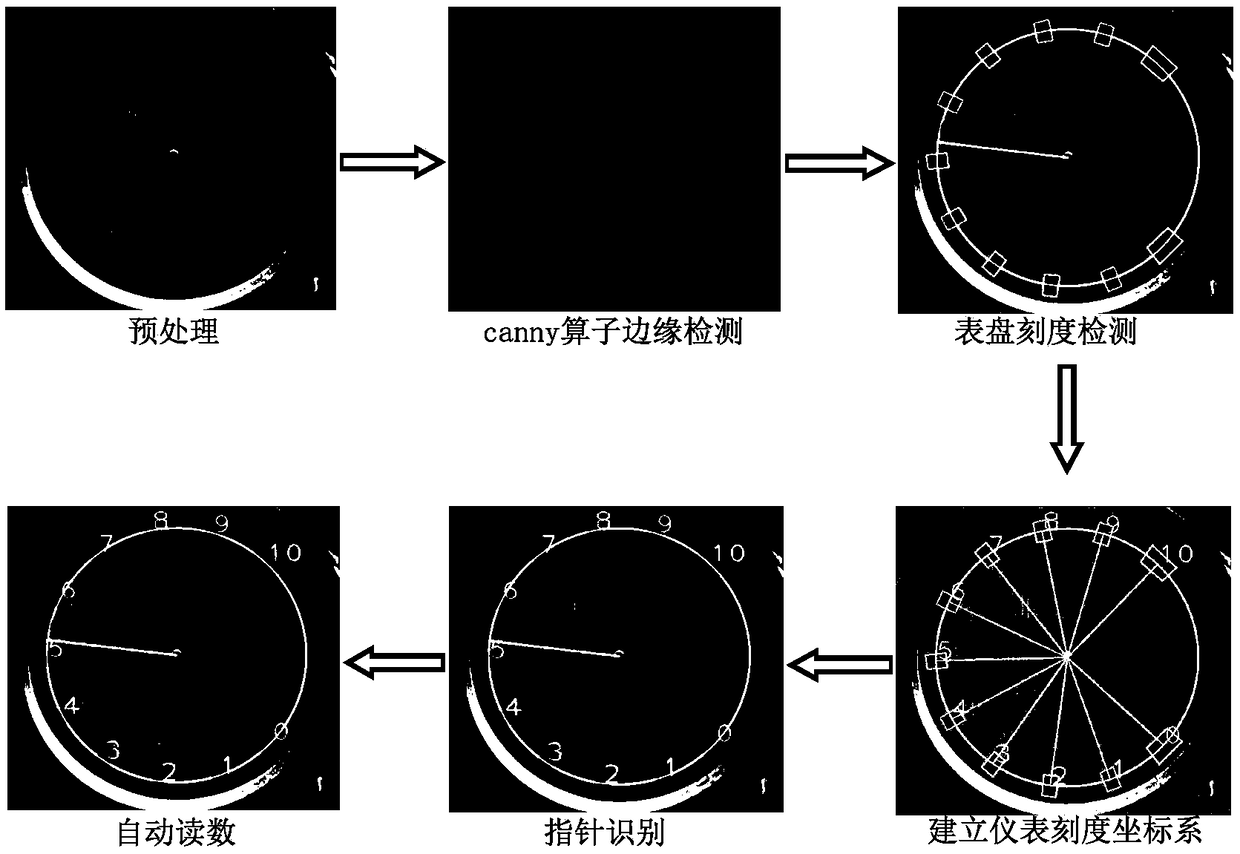
[0032] Step S1: automatic positioning of instrument scale rectangle and scale visualization, such as image 3 Shown:
[0033] Step S11: using the canny operator edge detection and the 8-neighborhood contour tracking algorithm to extract the edge contour of the meter;
[0034] Step S111: grayscale the original image: grayscale an RGB image, that is, carry out weighted average according to the sampling values of each channel of the image.
[0035] Method 1: Gray=(R+G+B) / 3;
[0036] Method 2: Gray=0.299R+0.587G+0.114B;
[0037] Among them, R, G, and B respectively represe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More