

Cloth grasping device and software robot
A grasping device and robot body technology, applied in the field of robots, can solve the problems of affecting processing efficiency, cloth slipping, unstable grasping, etc., to achieve the effect of improving efficiency, avoiding cloth slipping, and cost-effective
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
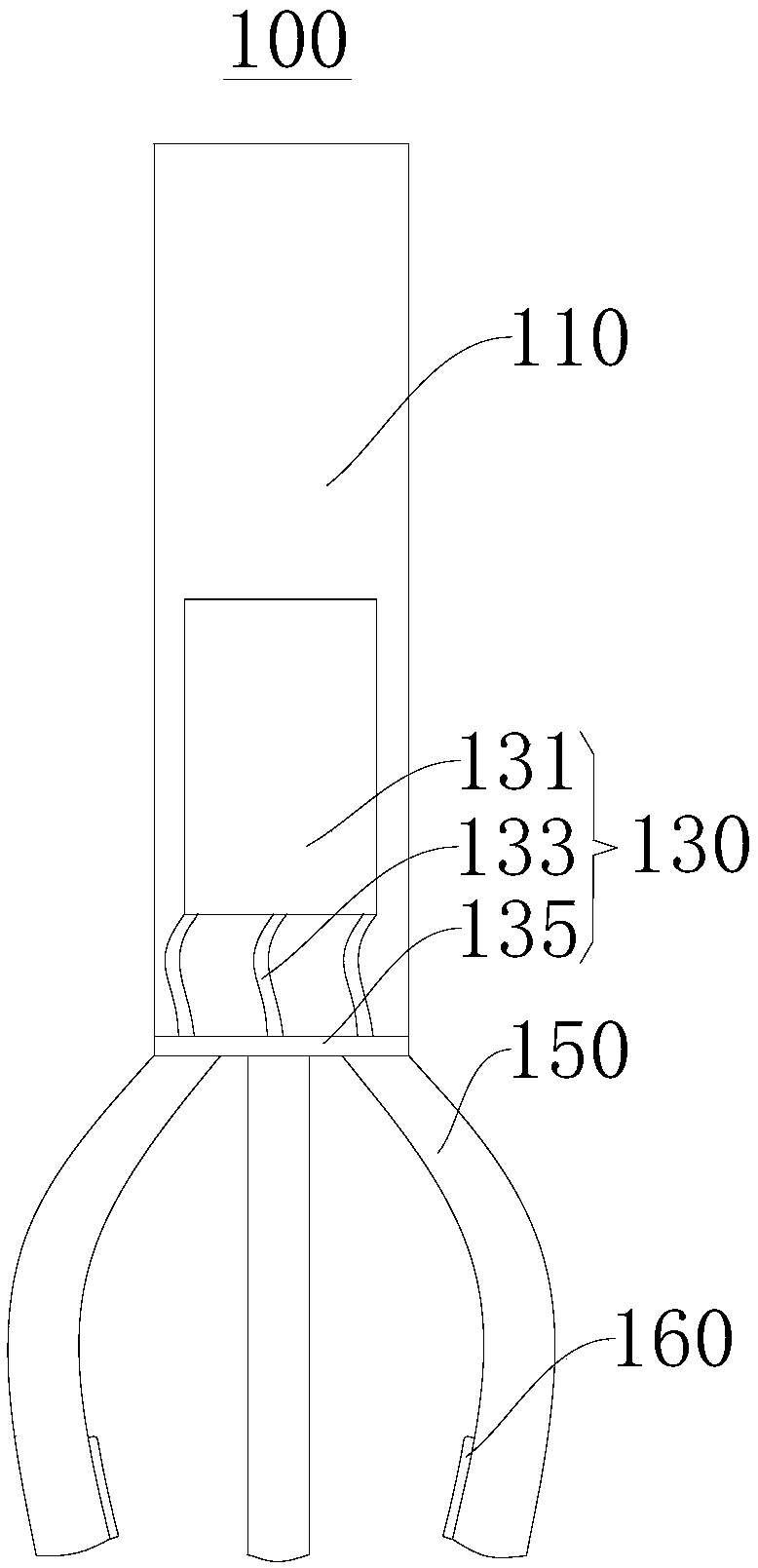
[0035] Please refer to figure 1 , the embodiment of the present invention provides a cloth grabbing device 100 for grabbing cloth. The utility model has a simple structure, can grasp the cloth, is stable and reliable, prevents the cloth from slipping, improves the efficiency of processing and transportation, has strong practicability and high cost performance.
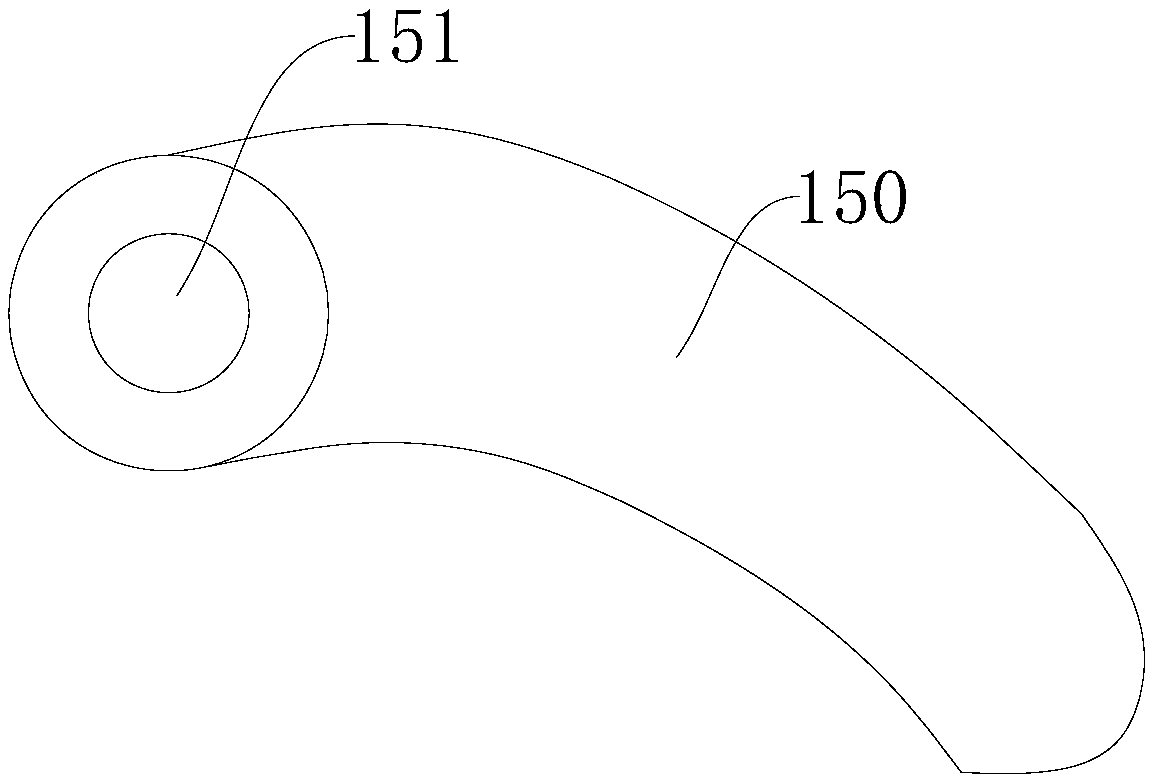
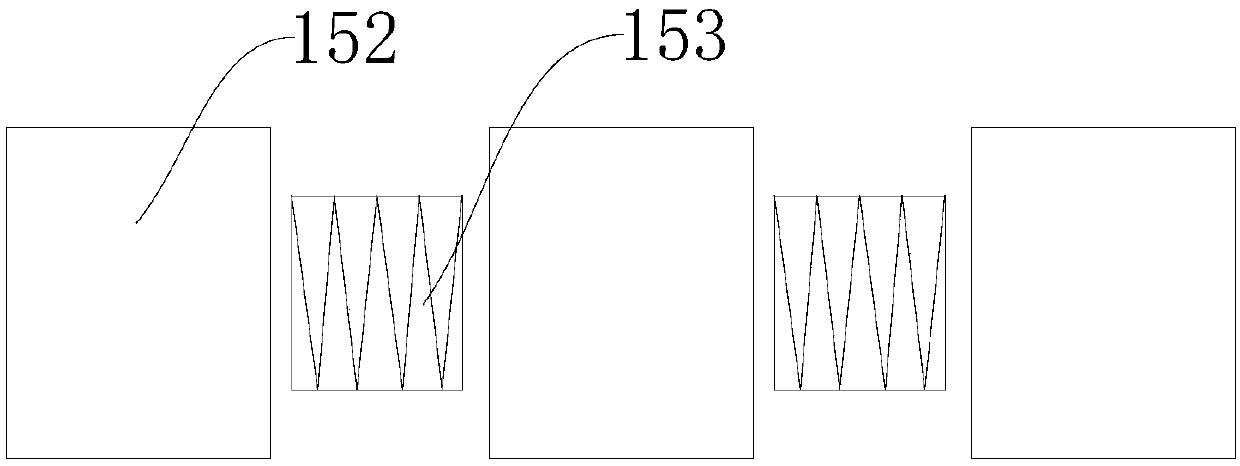
[0036] The cloth grabbing device 100 includes a grabbing arm 110 , a pneumatic mechanism 130 and a plurality of soft fingers 150 . A plurality of soft fingers 150 are mounted on one end of the grabbing arm 110 and can be closed or separated relative to the grabbing arm 110 to grab the cloth. The ends of the plurality of soft fingers 150 away from the grabbing arm 110 are all set on a preset plane (not shown in the figure). In this embodiment, the preset plane is the surface of the platform on which the cloth is laid, and the cloth is laid on the surface. The pneumatic mechanism 130 is installed on the grasping arm 11...
no. 2 example
[0049] Please refer to Figure 5 , the embodiment of the present invention provides a soft robot 10 , including a robot body 200 and a cloth grabbing device 100 . Wherein, the basic structure, principle and technical effect of the cloth grabbing device 100 are the same as those of the first embodiment. For brief description, for parts not mentioned in this embodiment, reference may be made to the corresponding content in the first embodiment.
[0050] In this embodiment, one end of the grabbing arm 110 is connected to a plurality of soft fingers 150, and the other end is installed on the robot body 200, and can move relative to the robot body 200, so that the soft fingers 150 can control the cloth from multiple angles. Grabbing, improving the accuracy of grabbing, flexible and convenient.
[0051] The beneficial effect of the soft robot 10 provided by the embodiment of the present invention is the same as that of the first embodiment, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More