A method and device for controlling the running attitude of an electric power inspection robot
A technology of power inspection and running attitude, applied in the field of data processing, can solve the problems of safety accidents, poor obstacle avoidance performance, and poor anti-skid performance of power inspection robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
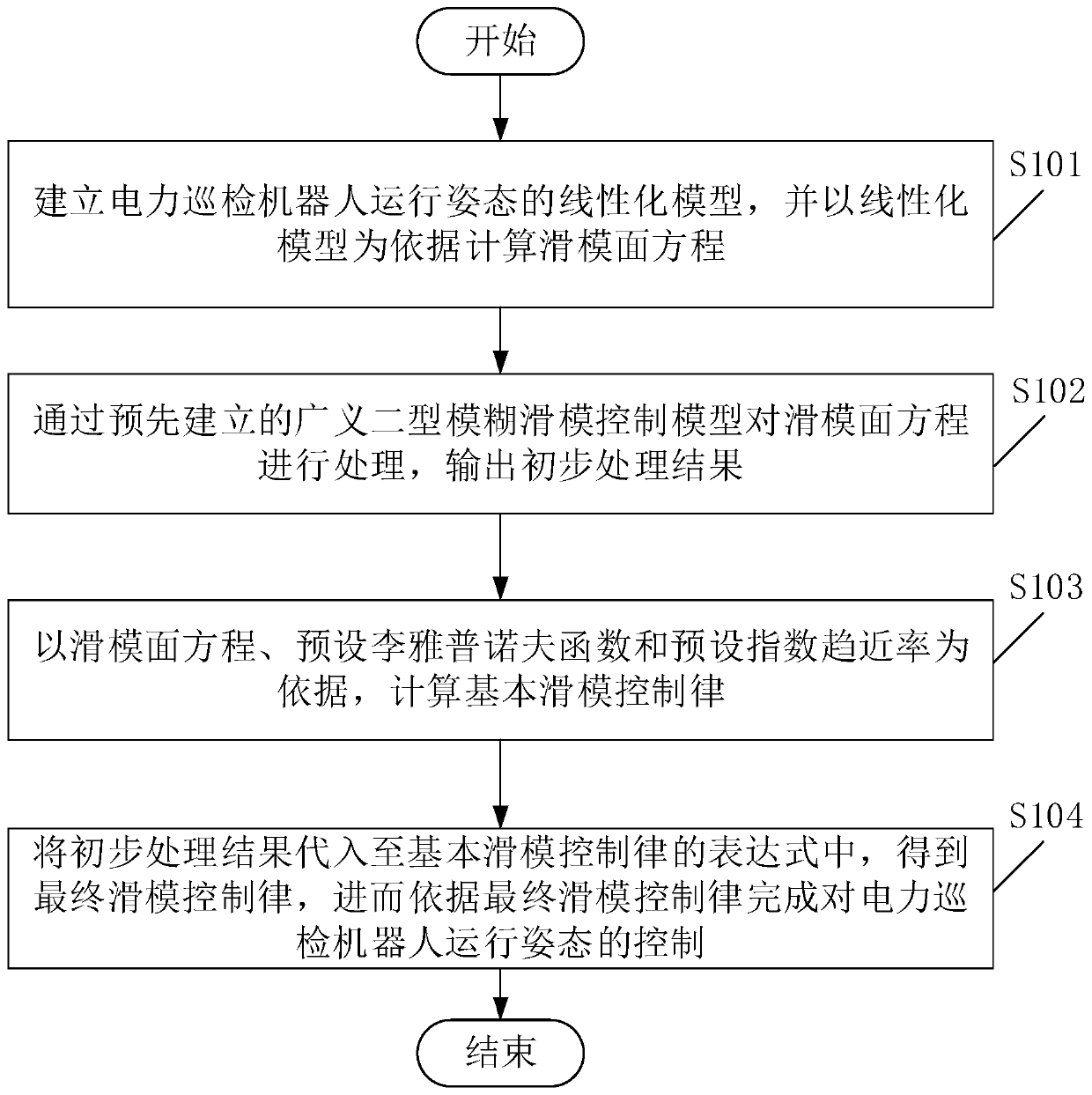
[0078] see figure 1 , figure 1 It is a schematic flow chart of a method for controlling the running posture of an electric power inspection robot provided in Embodiment 1 of the present invention. Among them, such as figure 1 As shown, the control method for the running attitude of the power inspection robot may include the following steps:
[0079] S101. Establish a linearized model of the running posture of the electric inspection robot, and calculate a sliding surface equation based on the linearized model.
[0080] In this embodiment, the state variables of the power inspection robot are defined as follows:
[0081]
[0082] Among them, θ 1 is the rotation angle of the power inspection robot, θ 2 is the rotation angle of the movable joint of the power inspection robot, and are θ 1 and θ 2 the angular velocity.
[0083] Then the state equation of the power inspection robot is:
[0084]
[0085] Among them, m 1 is the mass of the main body of the power in...
Embodiment 2
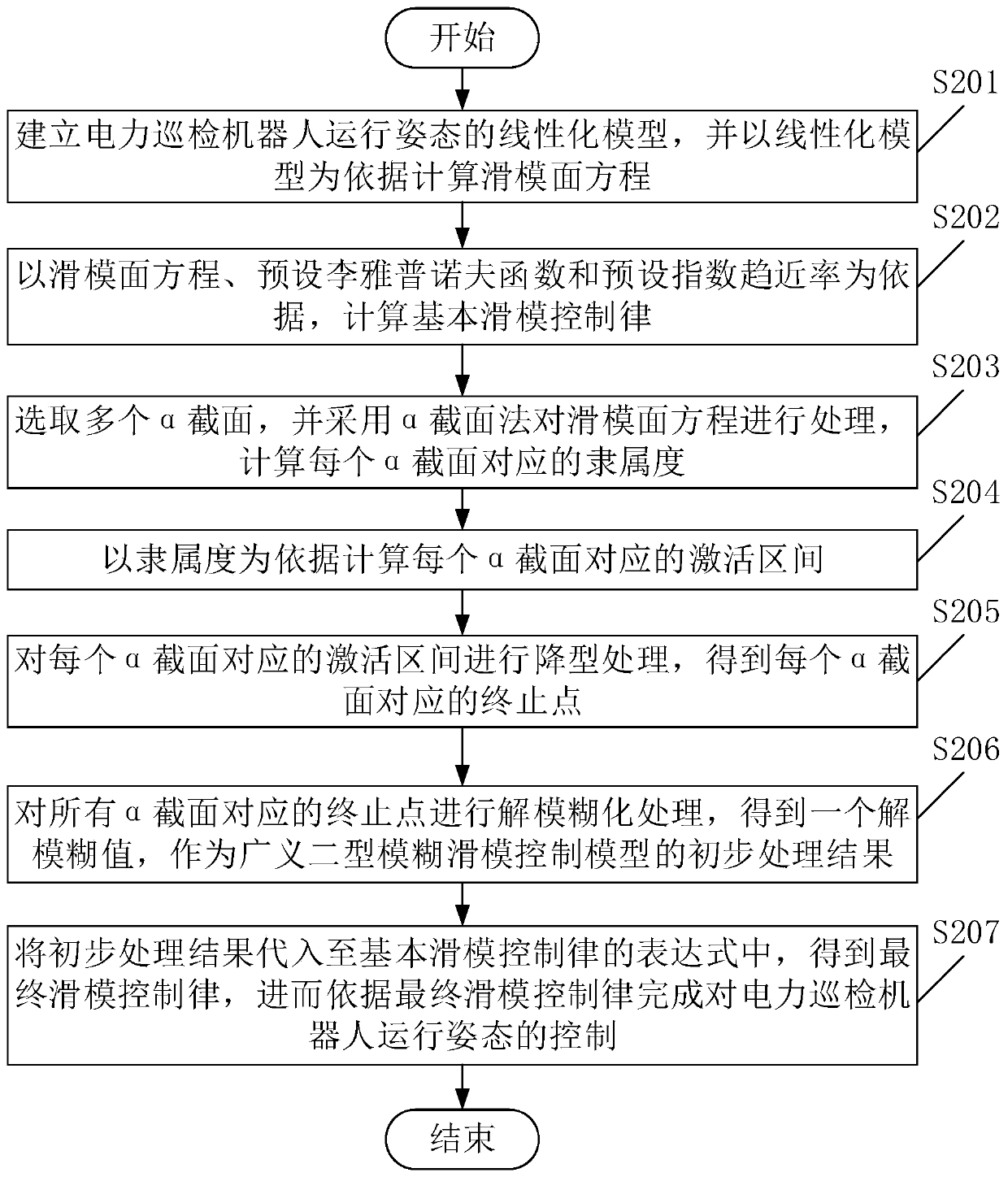
[0095] see figure 2 , figure 2 It is a schematic flow chart of a method for controlling the running posture of an electric power inspection robot provided in Embodiment 2 of the present invention. Among them, such as figure 2 As shown, the control method for the running attitude of the power inspection robot may include the following steps:
[0096] S201. Establish a linearized model of the running posture of the electric inspection robot, and calculate a sliding surface equation based on the linearized model.
[0097]In this embodiment, the linearized model of the running posture of the power inspection robot is:
[0098]
[0099]
[0100]
[0101]
[0102] in,
[0103]
[0104] Among them, x=[x 1 ,x 2 ,x 3 ,x 4 ] T is the state vector of the power inspection robot, a 21 、a 41 、a 23 , b 4 is the coefficient of the linearized model.
[0105] Please also refer to Figure 5 , Figure 5 It is a schematic diagram of a wire-loaded model of a power ...
Embodiment 3
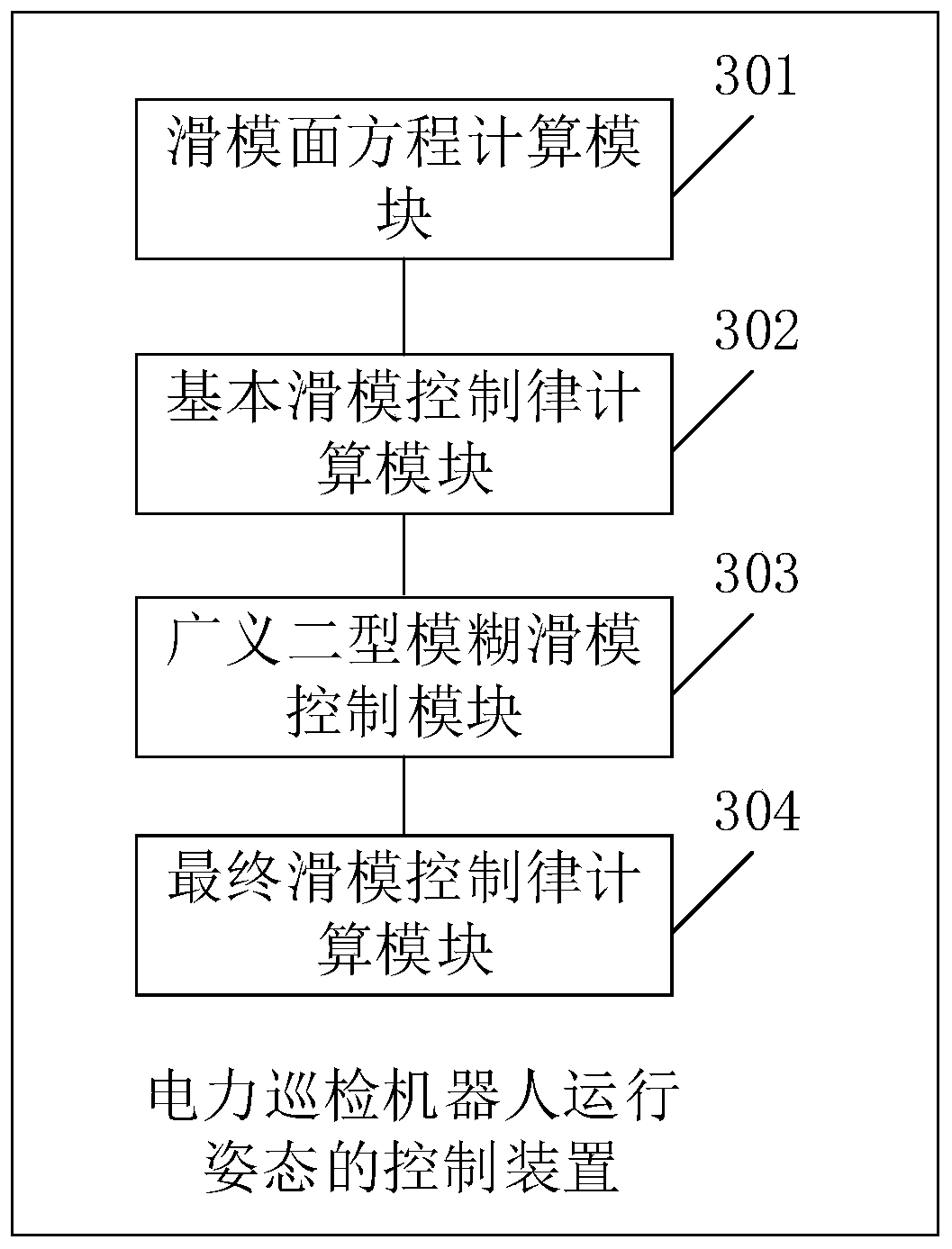
[0164] see image 3 , image 3 It is a schematic structural diagram of a control device for an electric patrol robot running attitude provided by Embodiment 3 of the present invention. Among them, such as image 3 As shown, the control device for the running posture of the power inspection robot includes:
[0165] The sliding mode surface equation calculation module 301 is used to establish a linearized model of the running posture of the electric inspection robot, and calculate the sliding mode surface equation based on the linearized model.
[0166] The basic sliding mode control law calculation module 302 is used to calculate the basic sliding mode control law based on the sliding surface equation, the preset Lyapunov function and the preset exponential reaching rate.
[0167] The generalized type-2 fuzzy sliding mode control module 303 is used to process the sliding surface equation through the pre-established generalized type-2 fuzzy sliding mode control model, and out...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com