

Jacking mechanism and AGV trolley thereof
A lifting mechanism and lifting block technology, applied in the field of robots, can solve the problems of inaccurate lifting of goods, non-unique movement trajectory, and large movement elasticity, and achieve the effects of unique movement trajectory, compact structure and strong movement rigidity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to fully understand the technical content of the present invention, the technical solutions of the present invention will be further introduced and illustrated below in conjunction with specific examples, but not limited thereto.
[0024] Such as Figure 1 to Figure 5 It is a drawing of an embodiment of the present invention.
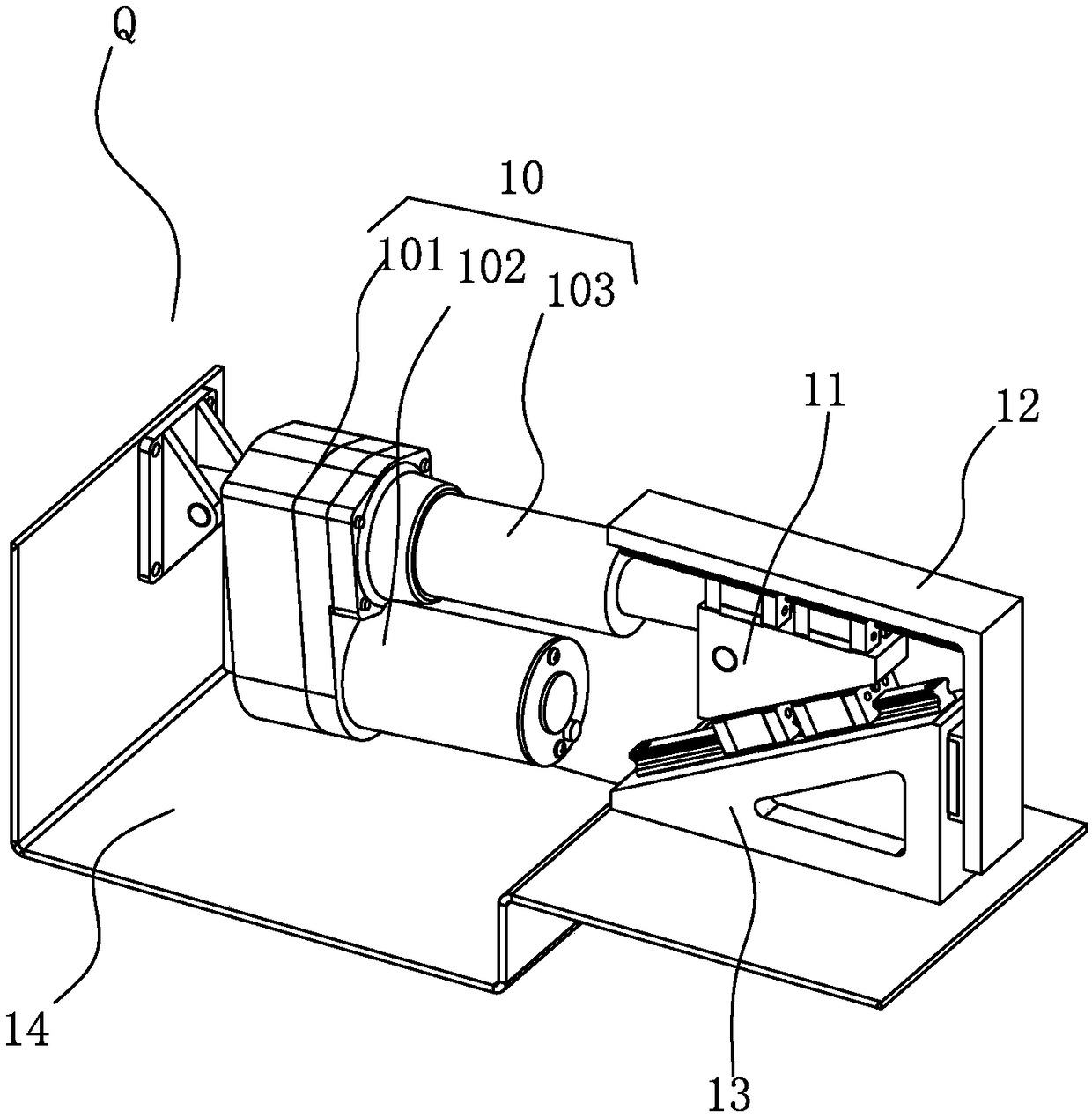
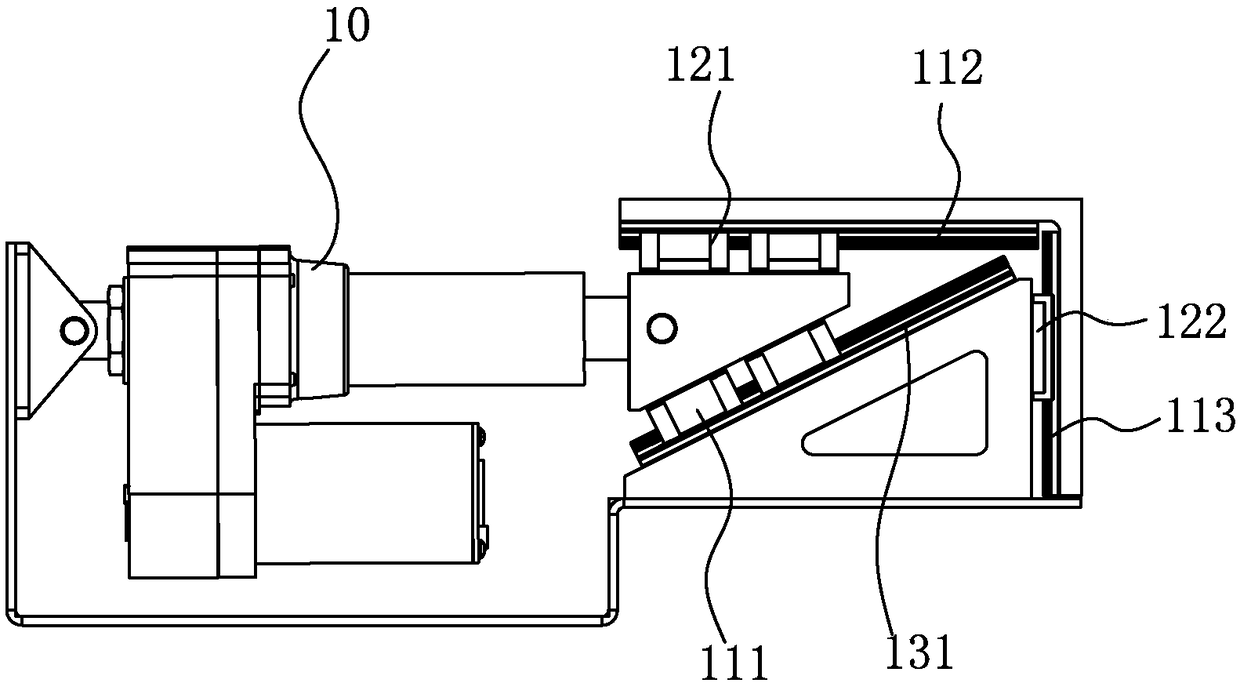
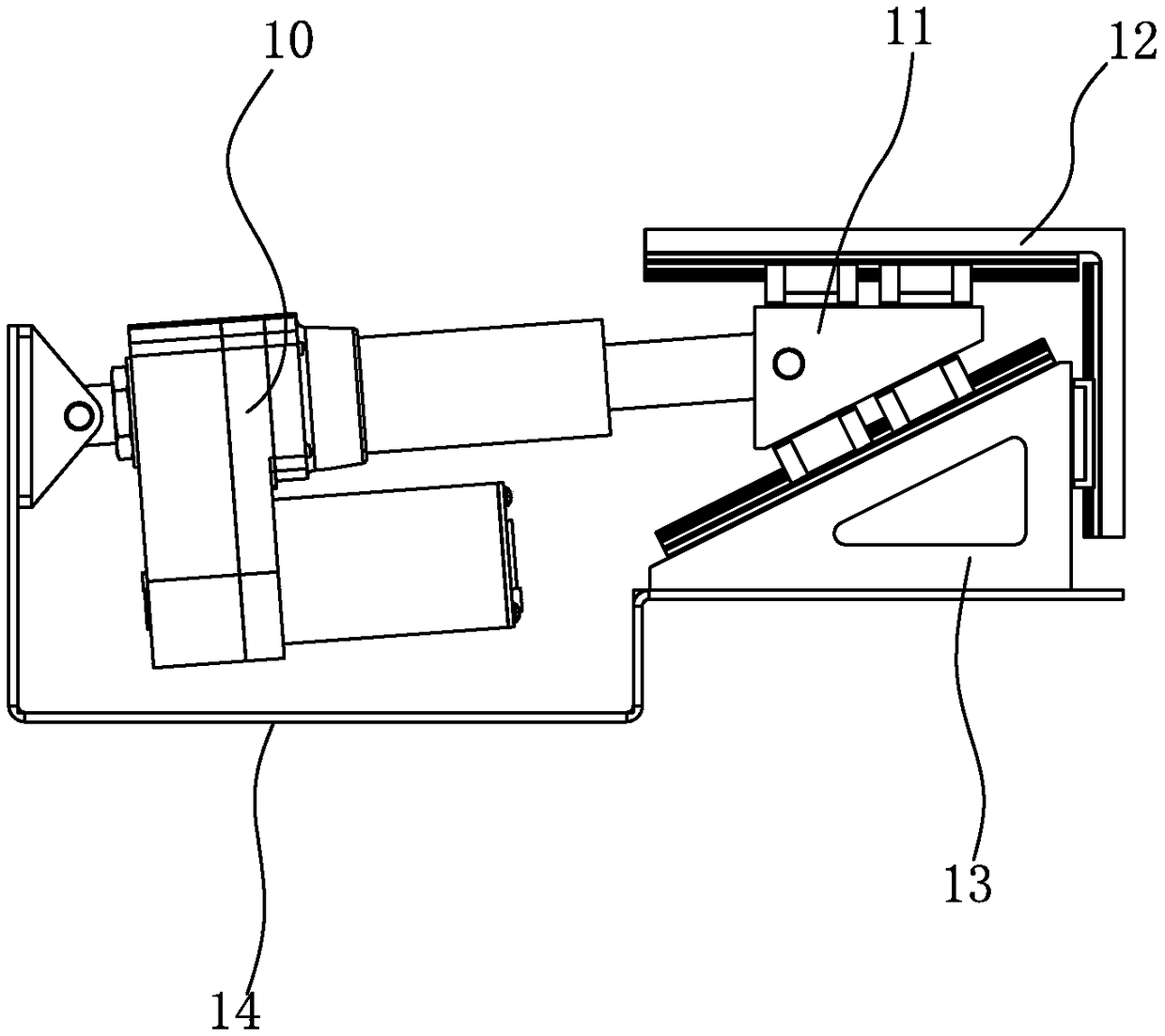
[0025] A jacking mechanism Q, such as Figure 1 to Figure 4 As shown, it includes a power assembly 10 , a push block 11 connected to the power output end of the power assembly 10 , and a jacking bracket 12 connected to the push block 11 . The pushing block 11 is slidingly coupled with the jacking block 13 provided. The power assembly 10 drives the push block 11 to move the jacking bracket 12 up and down.
[0026] The power output end of the power assembly 10 is linear motion. The power assembly 10 is hinged to the provided mounting base 14 , one end moves and the other end is hinged, which increases the degree of freedom of the power...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More