

A visual inertial navigation slam method based on ground plane assumption
A ground-level and ground-based technology, applied in image analysis, instruments, calculations, etc., can solve the problems of decreased accuracy and continuity, and achieve the effect of eliminating accumulated errors and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0143] The present invention will be further elaborated below in conjunction with the accompanying drawings of the description.
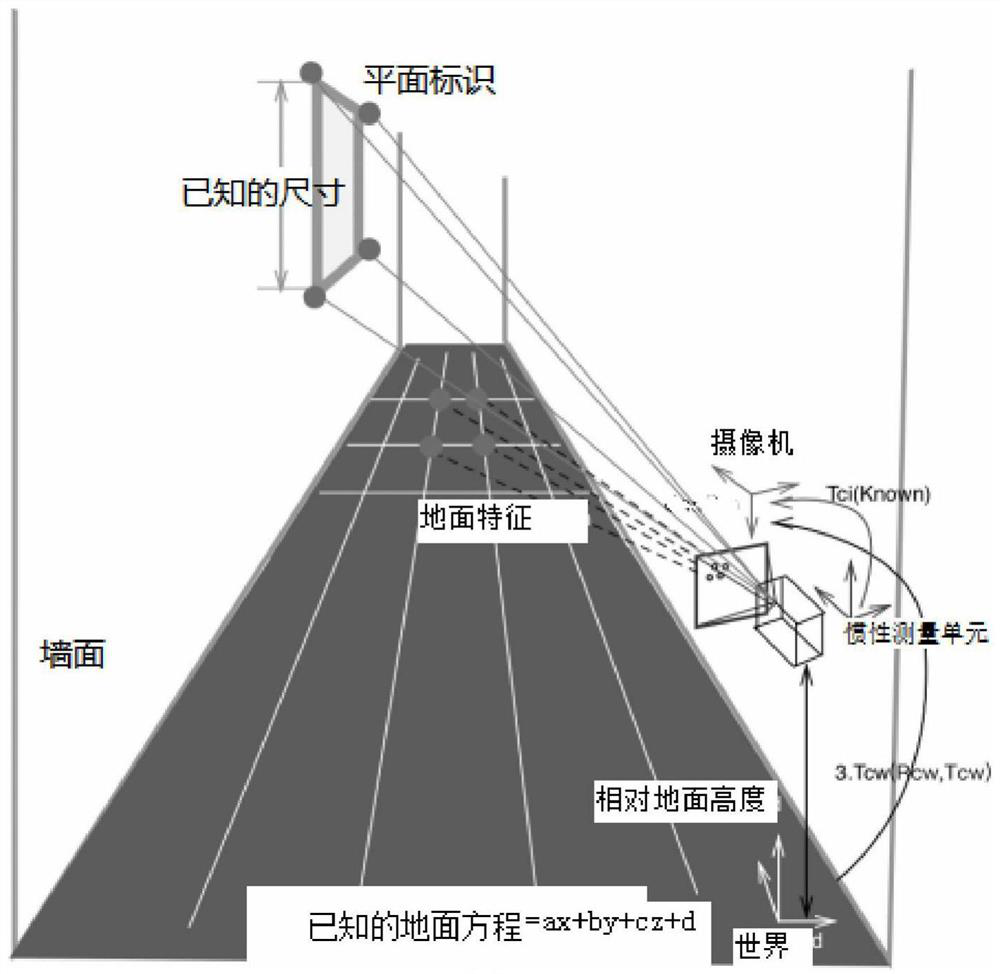
[0144] The present invention proposes a Visual-Inertial SLAM method (VIGO) based on ground plane assumptions, adding feature points on the ground and feature points on plane road signs as map features to realize SLAM. In order to make the positioning more robust and continuous, and restore the real scale, this paper adds an inertial sensor and adds the pre-integration data of the IMU to the optimization framework. In this way, the estimation of camera pose can be globally restricted, which greatly improves the accuracy. In addition, in the reconstructed 3D map, the ground area can be clearly constructed to provide richer information for subsequent AR applications or robot applications. The overall framework is as figure 1 shown.
[0145] The present invention is based on the visual inertial navigation SLAM method of ground plane hypothesis, compr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More