

Total station-based remote large-view-field binocular calibration method
A calibration method and technology of a total station, which is applied in the field of long-distance and large-field dual-target calibration, can solve the problems of low flexibility and low calibration accuracy, and achieve a wide range of applicable scenarios, high detection accuracy, and improved scene universality. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
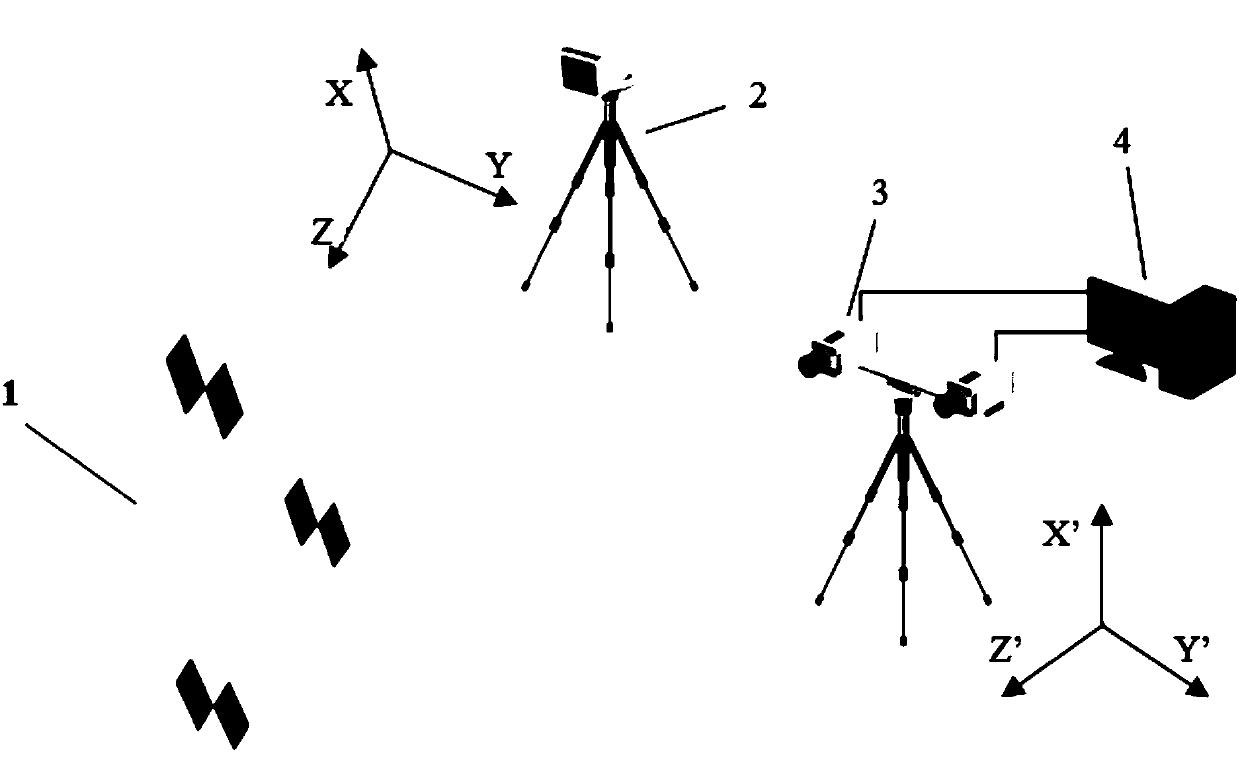
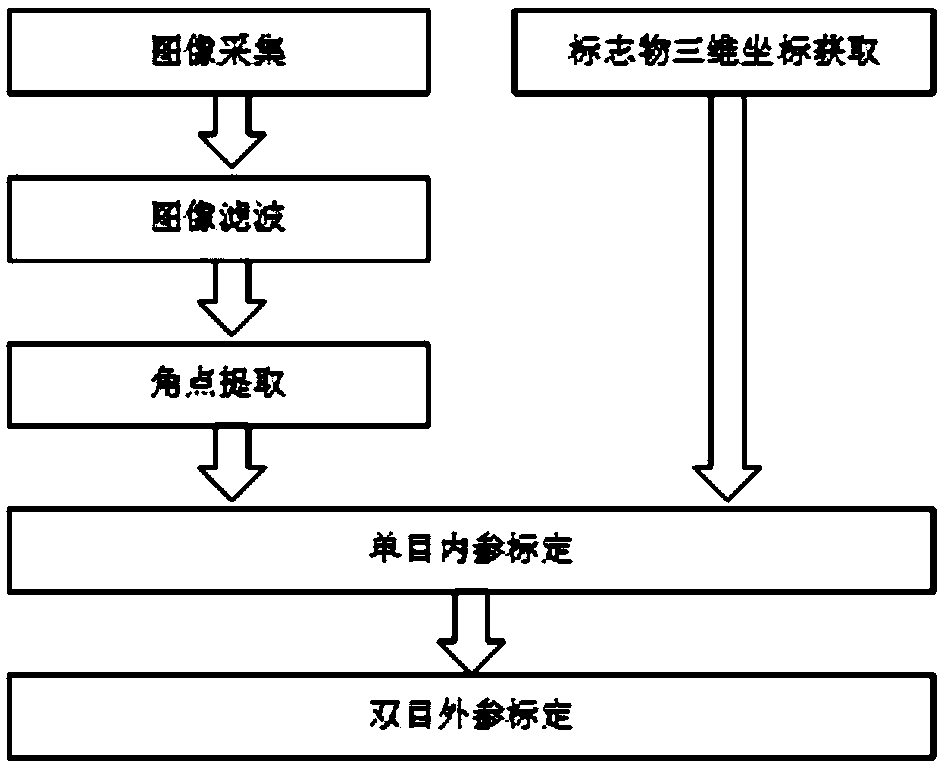
[0053] Technical solution of the present invention: the method device diagram is as attached figure 1 As shown, the algorithm flow is as attached figure 2 As shown, the distance between the binocular camera 3 and the marker 1 is 100m, and the distance between the total station 2 and the marker 1 should be greater than 10m. Obtain the precise three-dimensional coordinates of the markers in the coordinate system of the total station 2 through the total station 2, and then obtain the accurate relative positional relationship between the markers 1; keep the markers 1 still, and synchronize the binocular camera 3 to take pictures of the current markers Under the condition that the camera coordinate system is the world coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More