

A Method of Initializing State Parameters of UAV Based on Visual-Inertial Fusion
An initialization method and technology of state parameters, applied in complex mathematical operations, computer parts, instruments, etc., can solve the problems of unconstructed sensor noise model, neglect, etc., to reduce the calculation time, high tracking accuracy, and shorten the initialization process. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
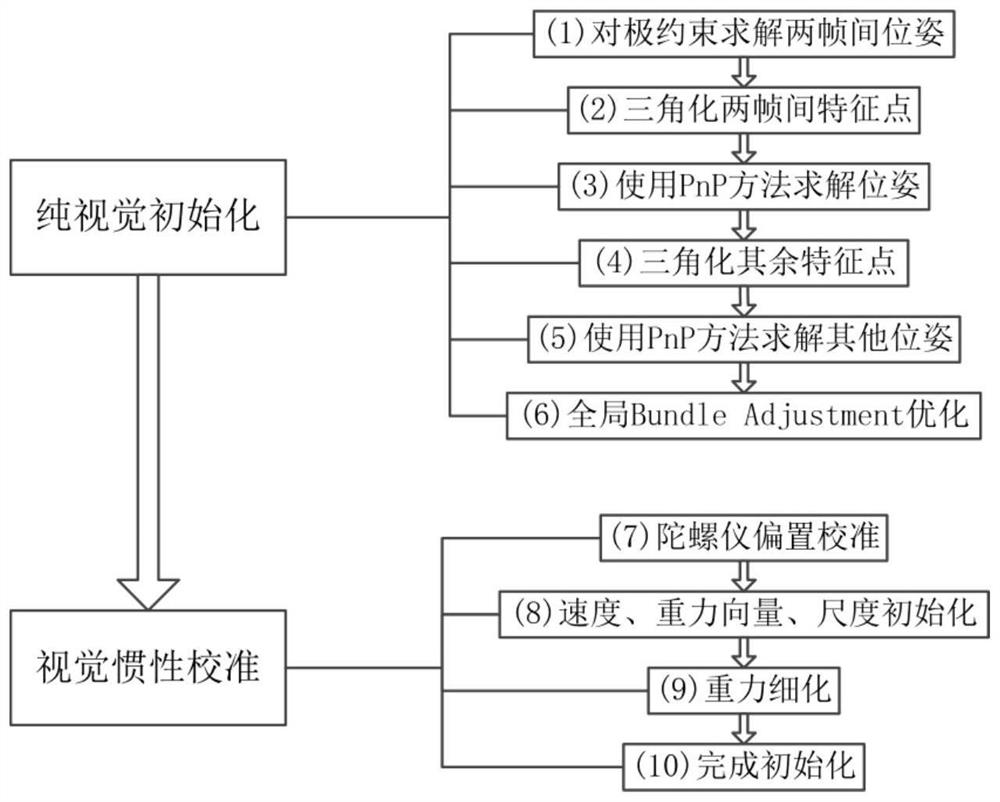
[0037] The present invention provides a UAV state parameter initialization method based on visual inertia fusion, drawing on the orB-SLAM initialization algorithm idea, improved design on the basis of VINS-Mono algorithm, such as Figure 1 as shown. Under the premise of less loss of accuracy, the system initialization process is accelerated and the calculation time is reduced.
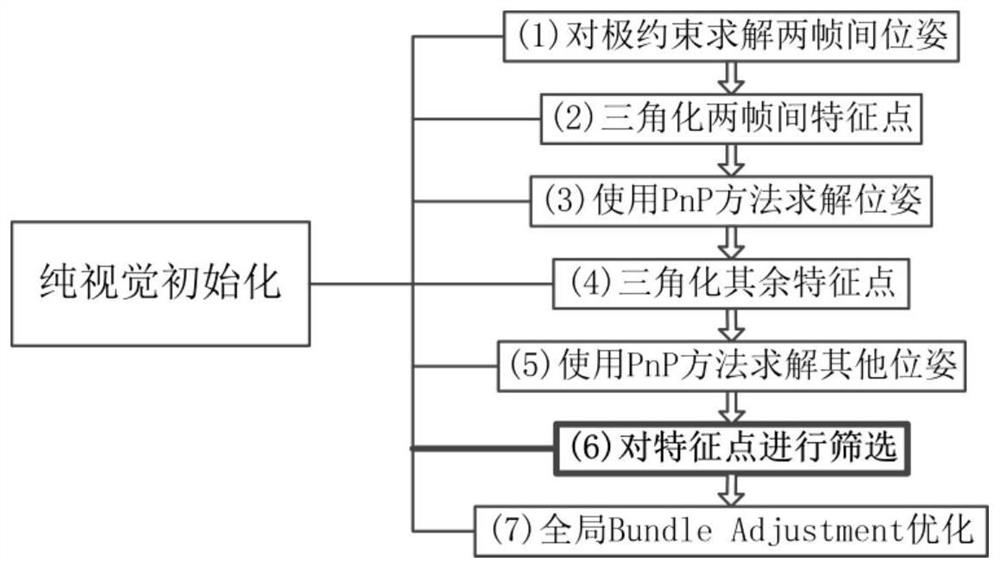
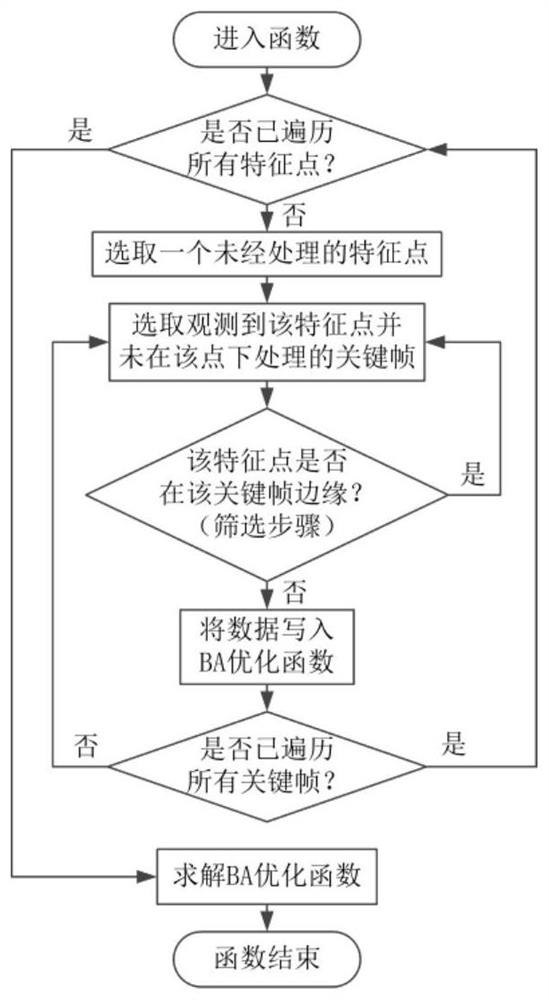
[0038] The present invention is a UAV state parameter initialization method based on visual inertia fusion, respectively, the pure visual initialization stage and the visual - inertial calibration stage are optimized. First of all, the feature points that will enter the final global Bundle Advancement (BA) optimization are screened, only the feature points in the middle of the image are retained, and the feature points near the edge of the image are not optimized, which reduces the number of feature points that need to be optimized and the scale of the operation at this stage, and the tracking accuracy of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More