

Underactuated variable-stiffness manipulator based on variable-stiffness elastic joints
A technology of elastic joints and variable stiffness, applied in the field of robotics, can solve the problems of application limitations of rigid manipulators and flexible manipulators, and achieve the effects of enhancing grasping ability and response speed, expanding the scope of application, and simple control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be further described below in conjunction with the drawings and embodiments.
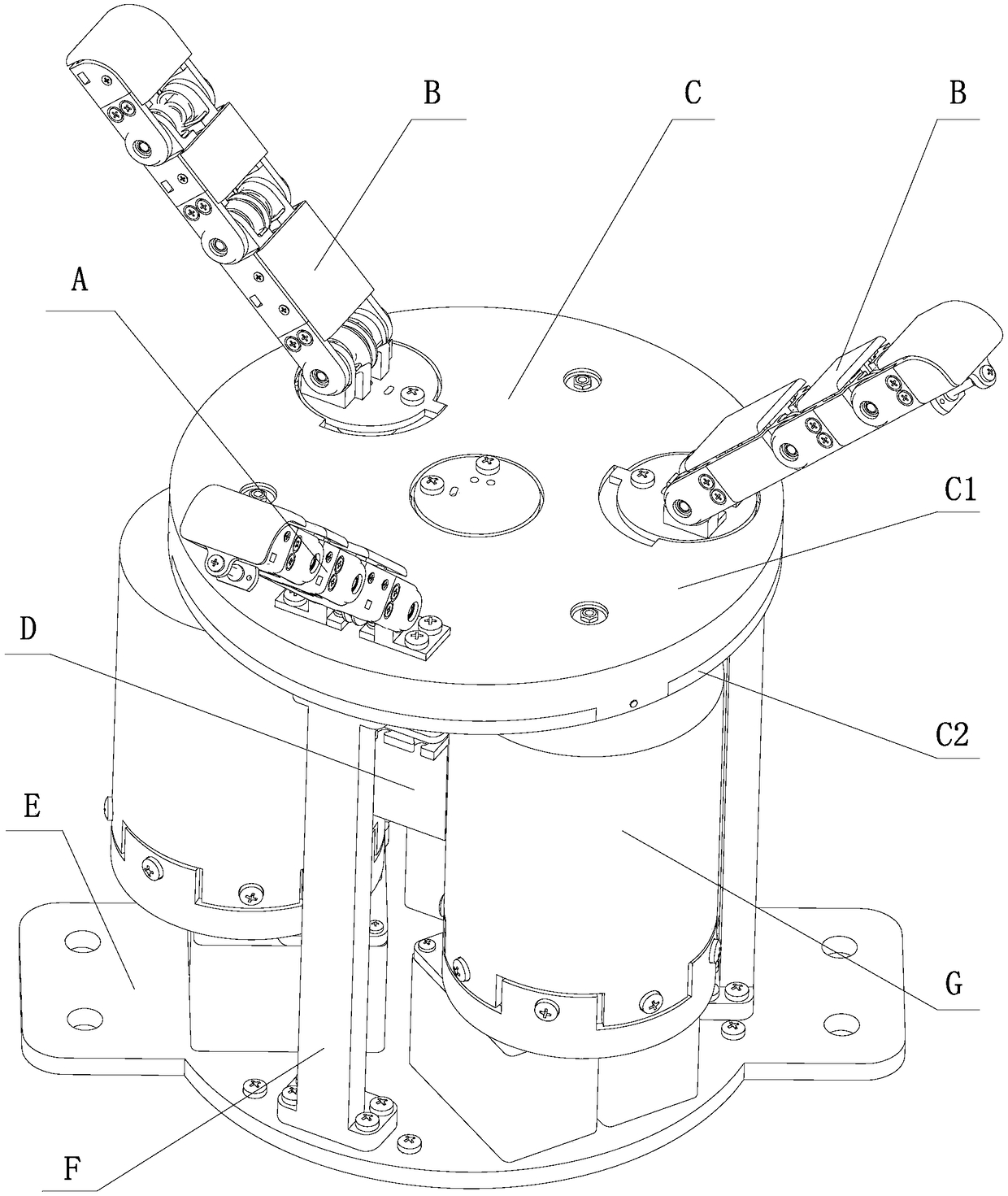
[0038] see Figure 1 - Figure 1 An underactuated variable stiffness manipulator based on variable stiffness elastic joints, it includes three variable stiffness elastic joints G, it also includes a palm C, a motor D, a base E, a support column F and three fingers, each of which is a curved extension hand Finger A and two coupled rotator fingers B;
[0039]The palm C is placed above the base E and the two are connected by a support column F. The base E is equipped with an axial and vertical motor D and three elastic joints G with variable stiffness. The finger B is set on the palm C along the circumference of the palm C. The output shaft of the motor D drives two coupled rotating and extending fingers B through the steel wire rope, and the output shafts of the three variable stiffness elastic joints G correspond to each other through the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More