

Robot dynamic obstacle avoidance method based on artificial potential field and rolling window
A rolling window and artificial potential field technology, which is applied in the direction of instruments, navigation calculation tools, non-electric variable control, etc., can solve the problem of unsatisfactory global optimization results and achieve the effect of improving optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
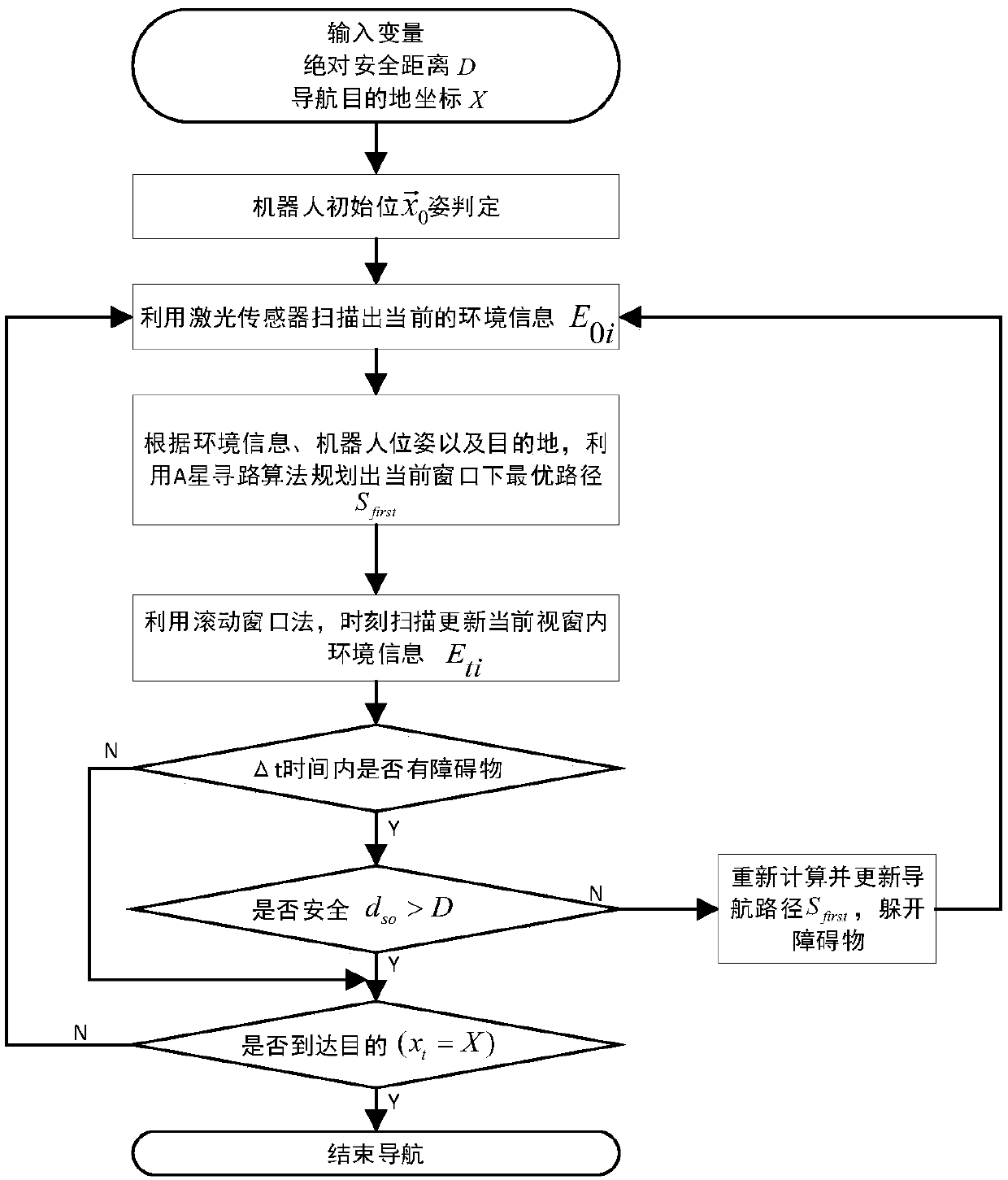
[0043] Such as figure 1 As shown, before step S1, we need to construct and store the static map feature information of the environment into the mobile robot.
[0044] S1: Input parameters, that is, the absolute safety distance D between the mobile robot and the obstacle and the coordinate information X(x, y) of the navigation target point in the constructed map.
[0045] S2: According to the historical data of the robot's odometer, that is, the odometer data at the time of ∞ → 0, and then combined with the environmental feature information E scanned by the laser sensor at this time 0i (i=1,2,...,n) is matched with the map environment model to locate the current pose of the robot
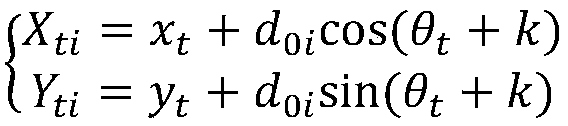
[0046] by E ti (i=1,2,...,n) and It can be judged that the global coordinates of obstacles in the environment at time t are O oti (X ti ,Y ti ):
[0047]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More