

Attitude control method, device and system for satellite platform with rotating load
A satellite platform and attitude control technology, applied in the field of satellites, can solve the problems of satellite platform attitude interference, difficulty in satellite platform attitude control, large amount of calculation and difficulty in control, etc., and achieve simple control, reduced control difficulty, and high control accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
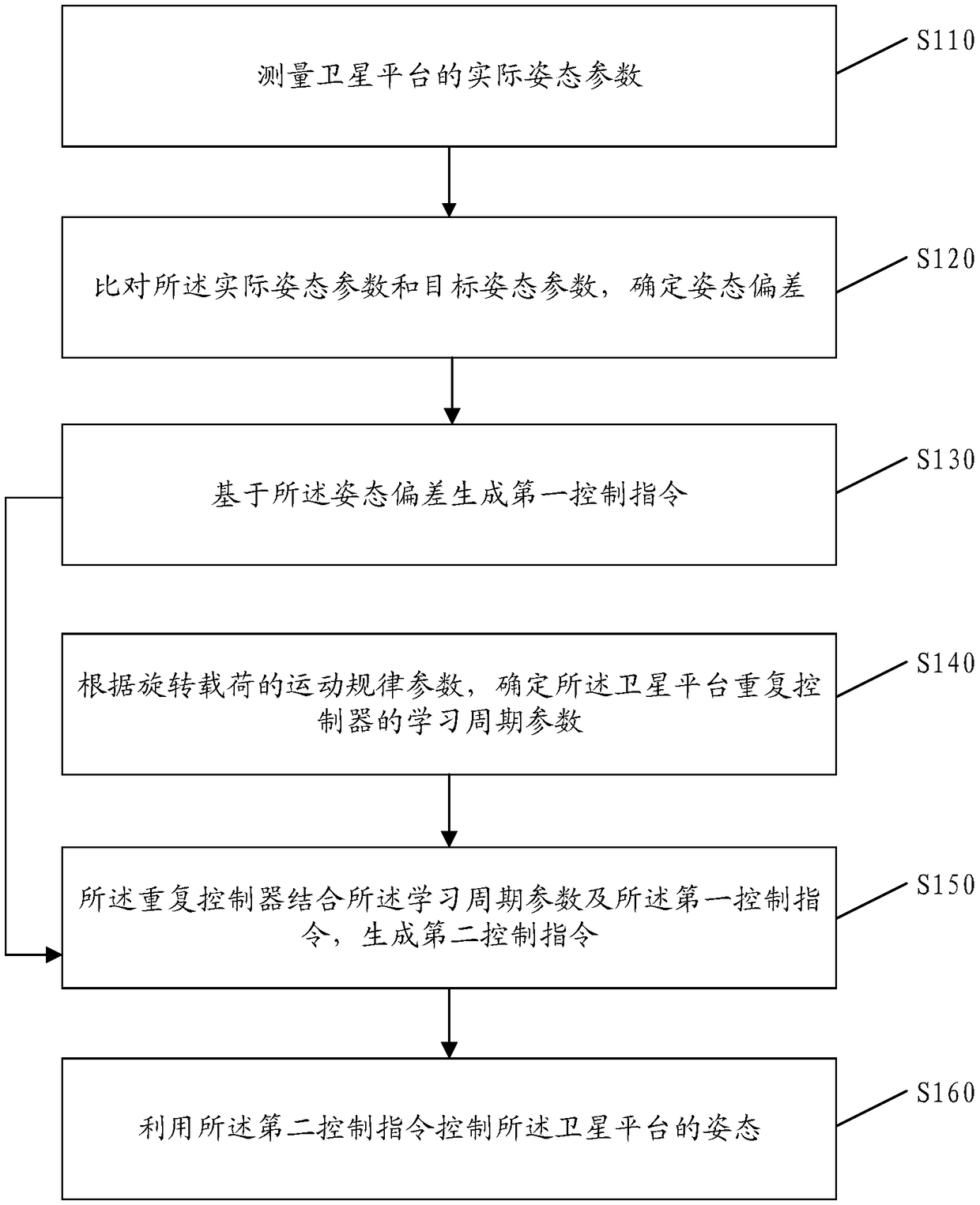
[0109] This example provides an attitude control method for a satellite platform, including two parts:
[0110] A part, using a PID controller to obtain an initial control instruction; the initial control instruction here is the aforementioned first control instruction;
[0111] Step 1: Measure the actual attitude angle θ and actual angular velocity ω of the satellite platform by using the sensor on the satellite platform;
[0112] Step 2: Compare the actual attitude angle θ and the actual angular velocity ω with the known target attitude angle θ h , target angular velocity ω h Compare to get the angle deviation e θ , angular velocity deviation e ω ;
[0113] The third step: use the obtained deviation value as the input quantity of the PID controller, and the design parameter k of the PID controller p 、k i 、k d Combined to get the PID controller output control torque u 1 =k p e θ +k i ∫e θ dt+k d e ω ;k p is the proportional parameter of the PID controller; k i...
example 2
[0136] The control system of this example includes: a PID controller and a repeating controller independent of the PID controller.
[0137] The satellite platform control system is designed according to the PID controller, and its parameters are:
[0138] k d =diag([157.62 157.62 157.62]);
[0139] k p =diag([12.42 12.42 12.42]);k i =diag([0.02 0.02 0.02]);
[0140] k r =1, N=3600.
[0141] The motion period of the rotating load is 36s, and the simulation step is 0.01s, so N=36 / 0.01=3600.
[0142] The initial attitude parameter of satellite attitude is ω b0 = [0 0 0]; theta b0 = [0 00];
[0143] The target attitude parameter is ω bt = [000]; θ bt =[000];
[0144] Mass of satellite platform: 1200kg;
[0145] Mass of rotating load: 800kg;
[0146] The moment of inertia of the satellite platform:
[0147] Moment of inertia of rotating load:
[0148] Maximum speed of flywheel: 6000r / min;
[0149] Maximum angular momentum of flywheel: 50N m s;
[0150] Maximum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More