

Multi-objective hierarchical collaborative control and optimization method for vehicles with driving intentions
A technology of driving intention and cooperative control, applied in the direction of control devices, etc., can solve problems such as crashing and driving off the road
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
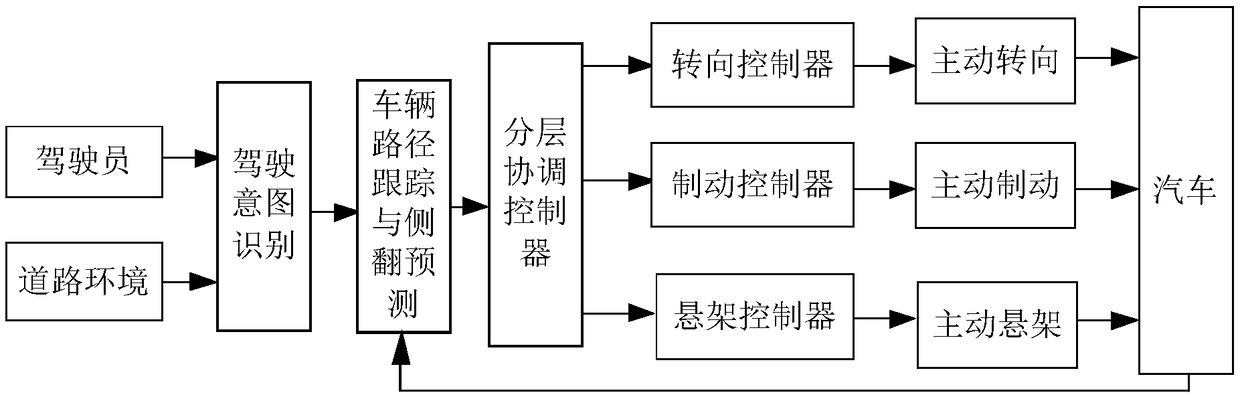
[0105] Such as figure 1 As shown, the present invention discloses a multi-objective layered cooperative control and optimization method for automobiles fused with driving intentions, comprising the following steps:
[0106] S1. Establish a driver's steering intention recognition model. Specifically include the following sub-steps:
[0107] S11. Select the characteristic parameter group composed of the steering wheel angle and the rate of change of the steering wheel, and identify the three driving intentions of cruising, normal steering and emergency steering.
[0108] The steering wheel angle value is used to determine whether a steering behavior occurs at this time, and the steering wheel angle change rate is mainly used to determine whether it is a sharp steering behavior at this time.
[0109] S12, as an embodiment, such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More