

Full-automatic unmanned aerial vehicle cluster operation device and method
A technology for working devices and unmanned aerial vehicles, which can be used in launching devices, devices for capturing or killing insects, and animal husbandry, etc., can solve the problems of reducing the working time of personnel, safety risks for personnel, and low operation efficiency, and improve the operation efficiency. Efficiency and the effect of reducing operational risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
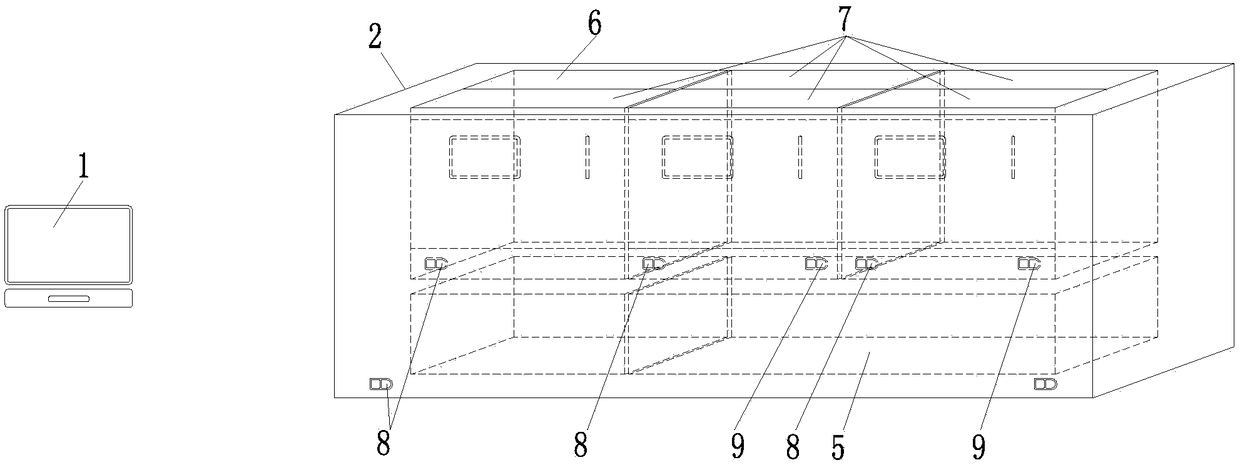
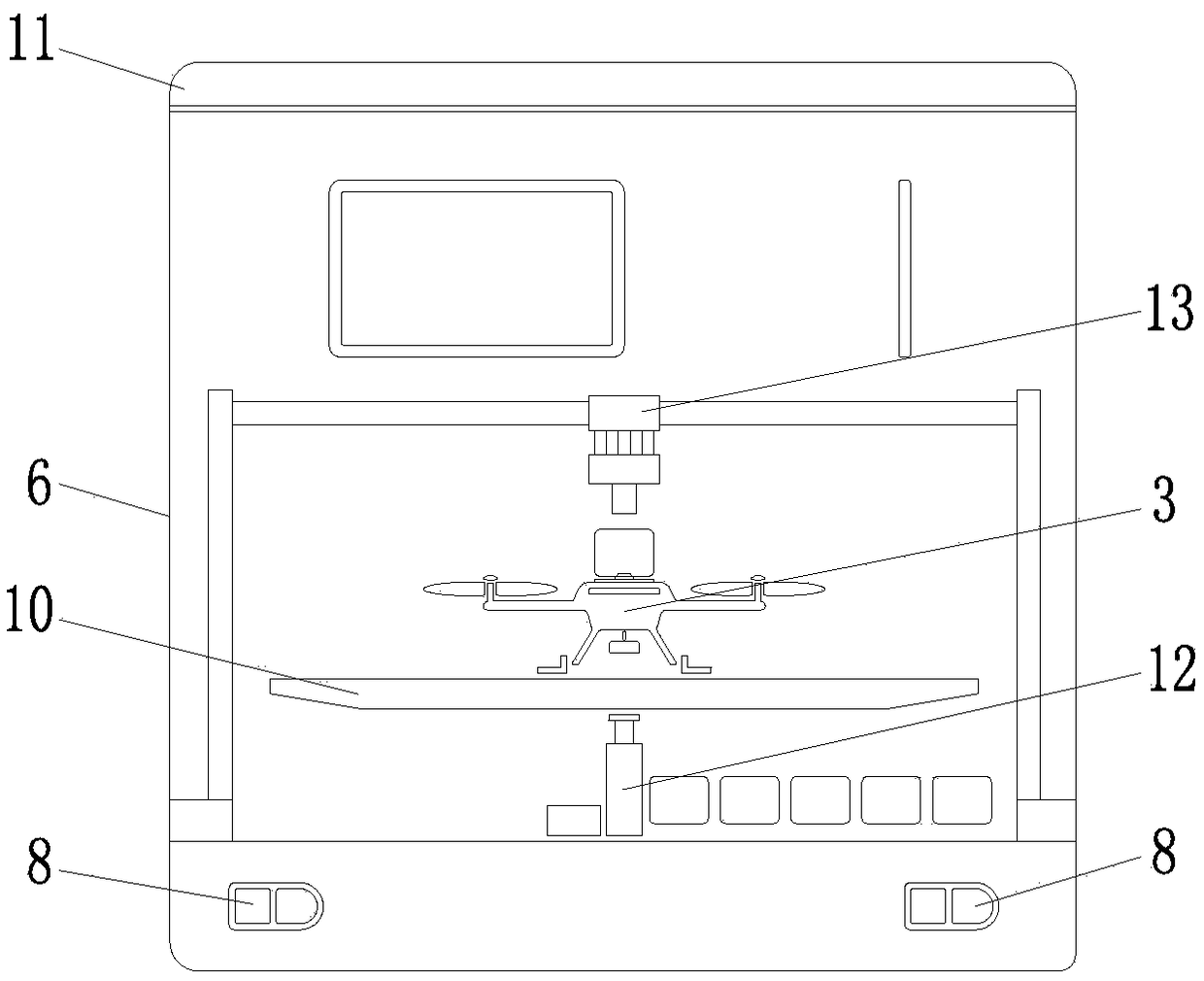
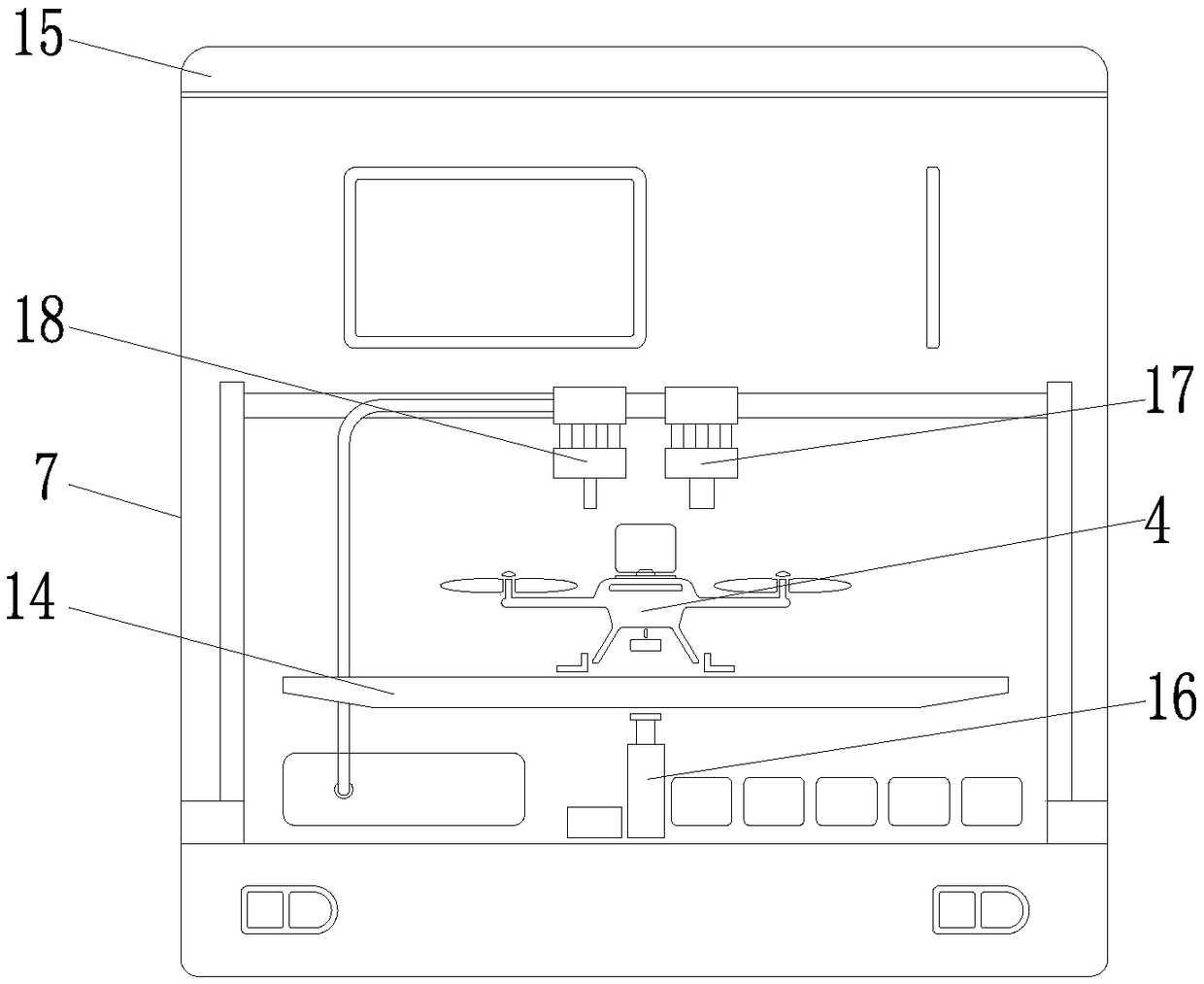
[0031] combine Figure 1 to Figure 3 As shown, the present invention discloses a fully automatic unmanned aerial vehicle cluster operation device, which acts on the plot, including a control unit 1 and an execution unit, the execution unit includes a sealed outer box 2, and the outer box 2 is provided with There is at least one reconnaissance machine 3 and at least two working machines 4 . The outer box 2 is provided with a battery module and a medicine box module 5 which are automatically docked with the working machines 4 . The device can be mounted on existing transportation vehicles, and can also be used as a fixed facility around the workplace.
[0032] In the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More