

Line inspection unmanned aerial vehicle obstacle avoidance method based on millimeter wave radar and line inspection unmanned aerial vehicle obstacle avoidance system based on millimeter wave radar
A technology of millimeter-wave radar and drones, applied in the field of drones, can solve the problems of high cost, not enough to distinguish wires, increase the load of drones, etc., and achieve the effect of avoiding collision wires
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
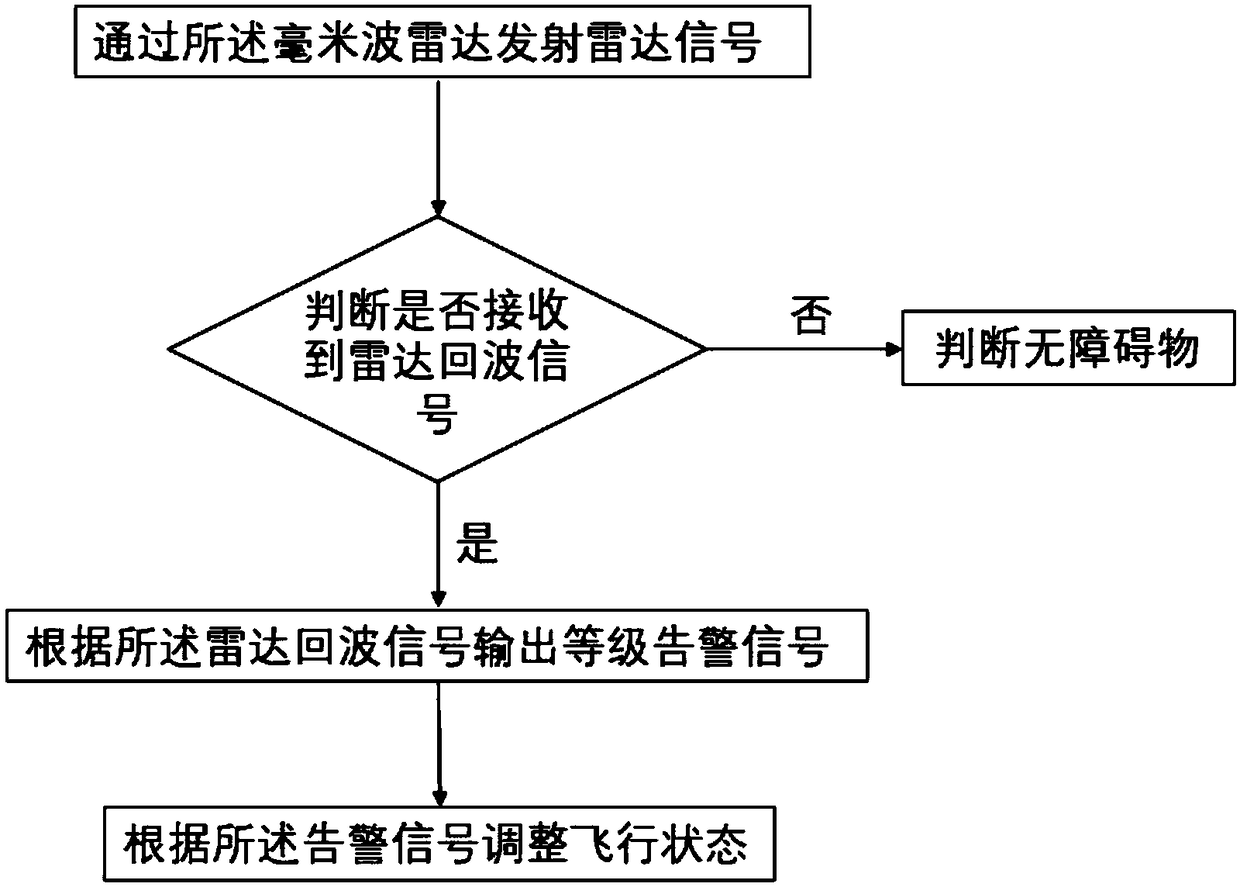
[0025] Such as figure 1 The schematic diagram of the obstacle avoidance method for the line inspection UAV based on the millimeter-wave radar provided by the embodiment of the present invention is shown. The method provided by the embodiment of the present invention includes the following steps:
[0026] The radar signal is transmitted by the millimeter-wave radar, and it is judged whether the radar echo signal is received, and if not, it is judged that there is no obstacle; if so, the level warning signal is output according to the radar echo signal; Adjust the flight status according to the above warning signal.
[0027] That is, by transmitting and receiving radar signals to judge the presence or absence of obstacles and measure the distance between the UAV and obstacles. If there is no radar echo signal after transmitting the radar signal, that is, the received radar signal is 0, it is judged that there is no obstacle or the distance between the obstacle and the UAV is to...
Embodiment 2
[0053] The second part of the present invention provides a line inspection UAV obstacle avoidance system based on millimeter wave radar. The UAV obstacle avoidance system includes a millimeter wave radar, an alarm level module and a flight adjustment module; the millimeter wave radar is used for The radar signal is transmitted and the radar echo signal is received; the warning level module is used to output a level warning signal according to the radar echo signal; the flight adjustment module is used to adjust the flight state according to the warning signal.
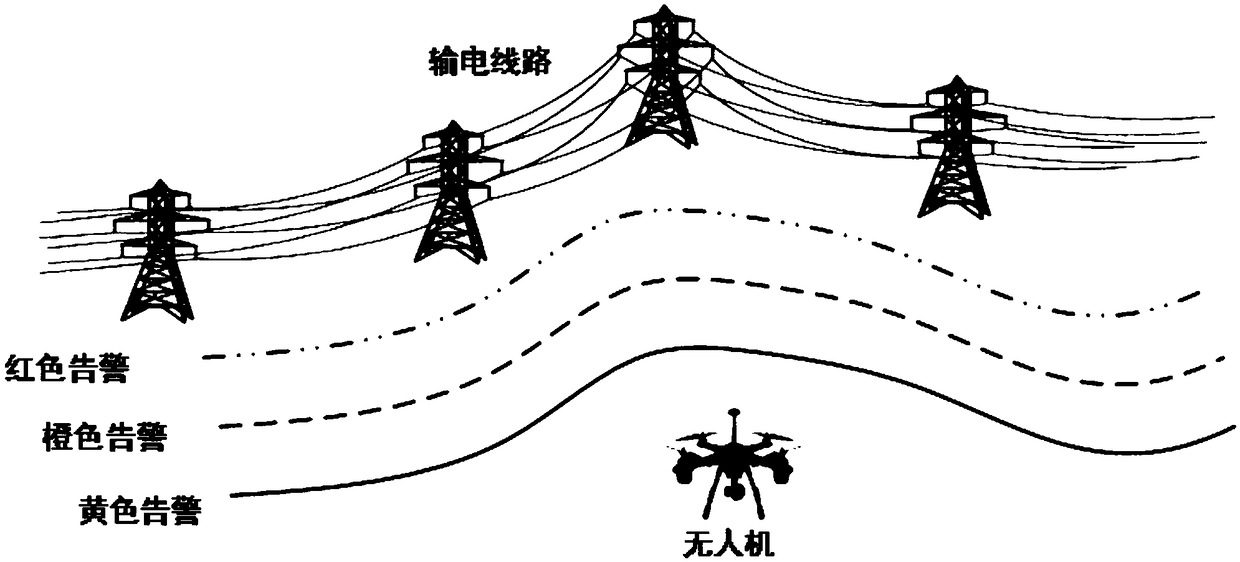
[0054] As an optional solution, the UAV is provided with millimeter-wave radars in four directions: forward, backward, left, and right, and the flight adjustment module is used to adjust the flight state according to the warning signal. :
[0055] A. If there is only one direction to output the alarm signal, slow down the flight speed of the alarm direction. If the alarm level is red, then move in parallel to the oppos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More