Adaptive non-singular fast terminal sliding mode observer control method
A sliding mode observer and adaptive sliding mode technology, applied in the direction of speed/torque control of a single motor, can solve the problems of easy external interference and poor dynamic performance of the system, avoid overshoot and oscillation, and improve stability. Performance, good adaptive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
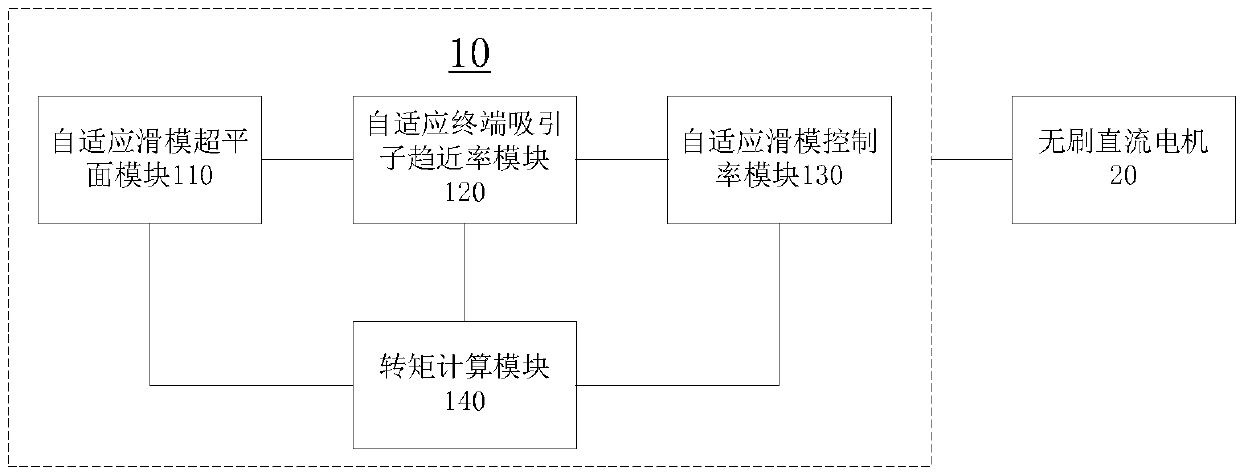
[0041] The present invention proposes a control method for an adaptive nonsingular fast terminal sliding mode observer 10, which is applied to an adaptive nonsingular fast terminal sliding mode observer 10. Please refer to figure 1 , figure 1 A schematic diagram of a sliding mode observer 10 and a brushless DC motor 20 is shown. The sliding mode observer 10 is typically connected to the brushless DC motor 20. The sliding mode observer 10 includes an adaptive sliding mode hyperplane module 110, an adaptive terminal attraction The sub approach rate module 120 , the adaptive sliding mode control rate module 130 , and the torque calculation module 140 .
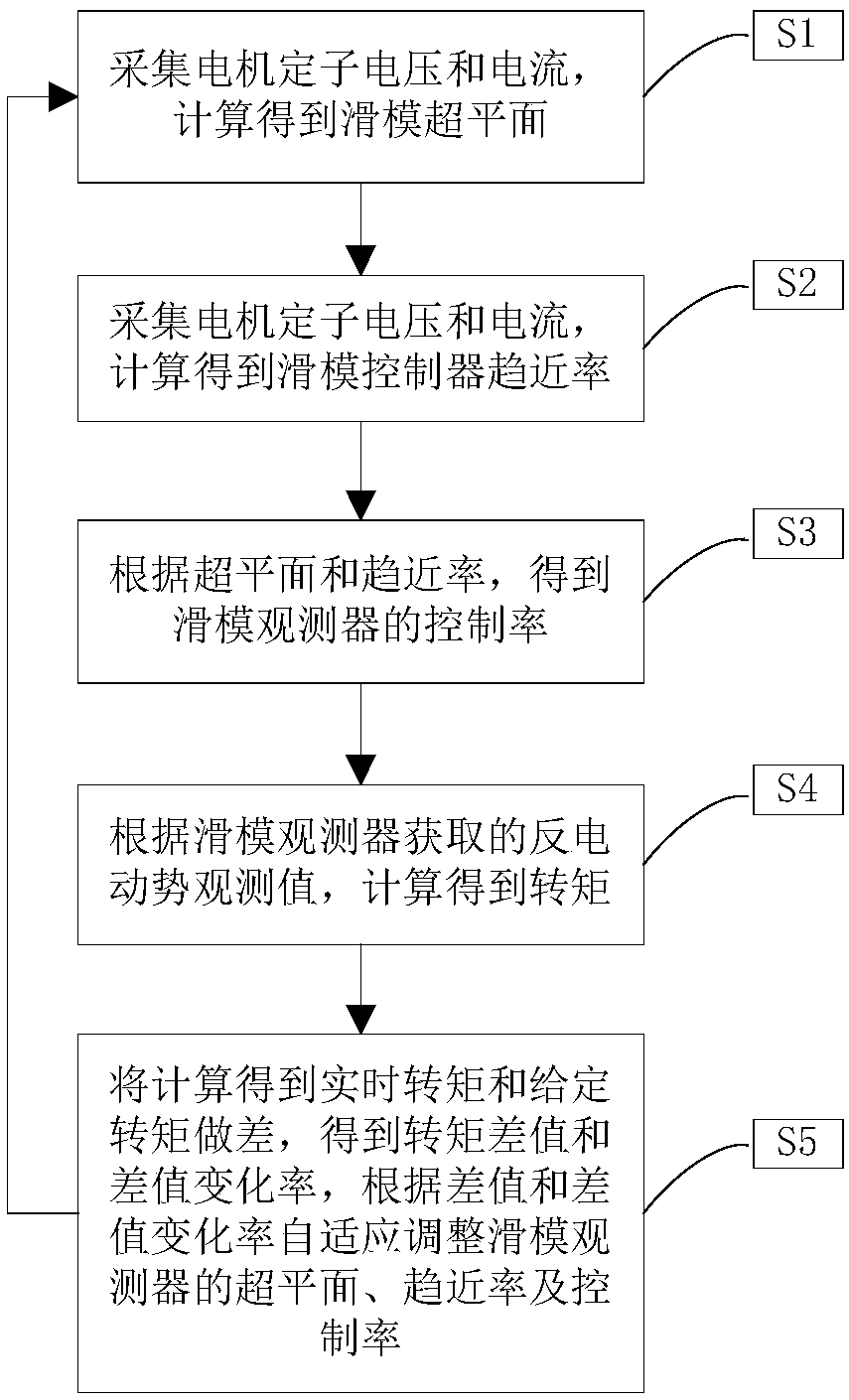
[0042] see figure 2 , the control method proposed by the present invention is realized through the following steps:
[0043] Step 1, collect the stator voltage u and stator current i of the brushless DC...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More