

PD-type compact-format model-free adaptive navigational speed control method for ocean vehicle
A model-free adaptive and speed control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as deviation from expected input, overshoot and oscillation of the speed system, and aggravate overshoot and oscillation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The following examples describe the present invention in more detail.
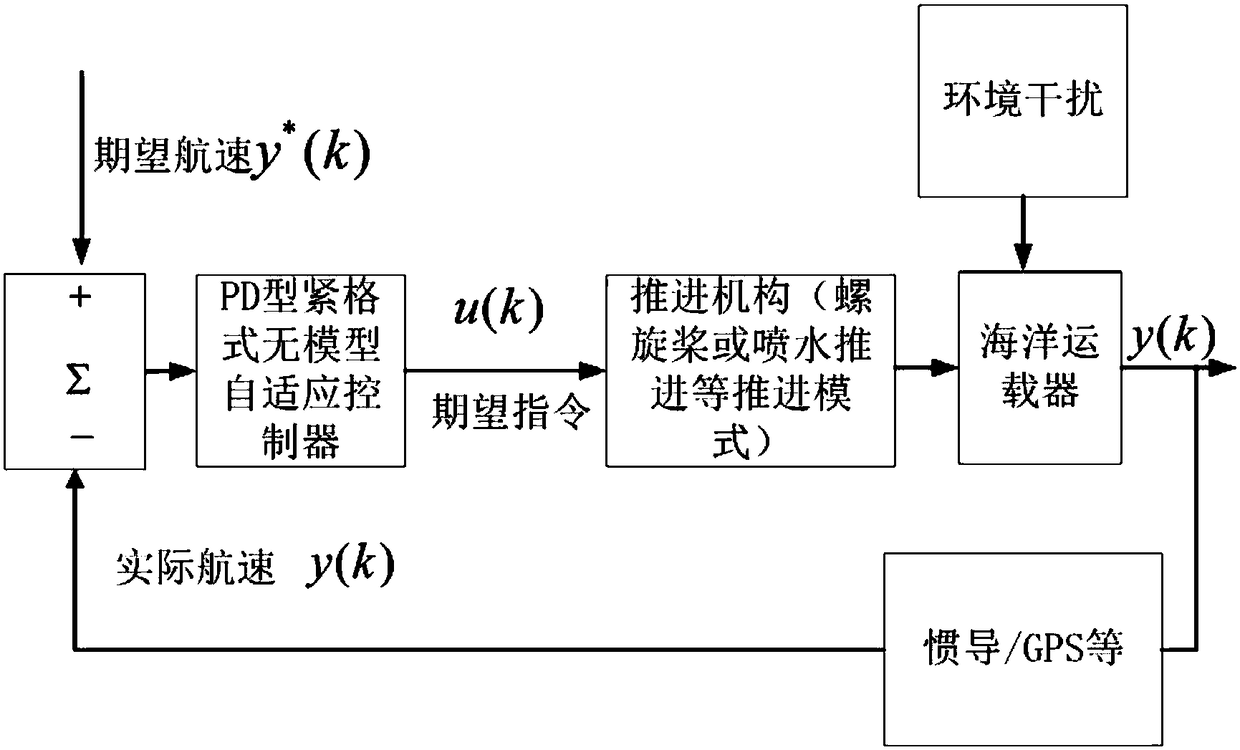
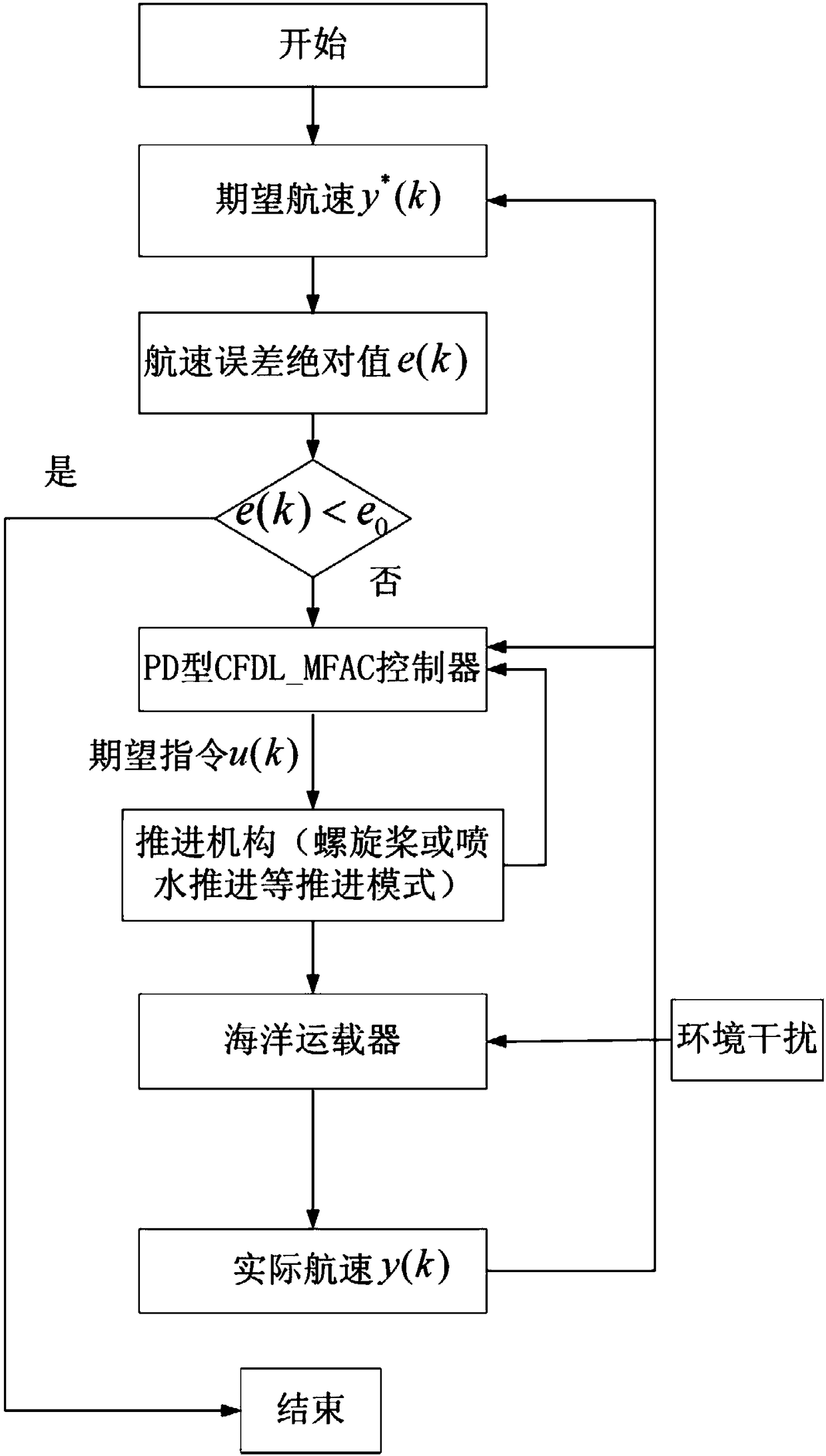
[0021] combine figure 1 , the marine vehicle speed system model of the present invention mainly includes: issuing the desired speed command to the marine vehicle, i.e. y*(k), measuring the current actual speed y(k) of the ship by using the compass, and calculating the absolute value of the speed error e(k ), as the input of the PD-type CFDL_MFAC controller, and the controller solves the expected command u(k) (expected voltage or expected rotational speed or expected thrust). The present invention takes the expected voltage as an example. Voltage command, so as to change the speed of the ocean carrier, measure the speed of the ocean carrier at the next moment through the magnetic compass carried on the ocean carrier, and make a difference with the expected speed and take the absolute value, and use it as the next moment of the PD type CFDL_MFAC controller input of. At the same time, considering the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More