

A Nonlinear Filtering Method with Random Occurrence Uncertainty and Quantized Measurements
A nonlinear filtering and uncertainty technology, which is applied in the field of nonlinear filtering, can solve the problems of large filtering error and the inability of filtering technology to deal with uncertainty and quantitative measurement at the same time, and achieve the effect of reducing the relative error of filtering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
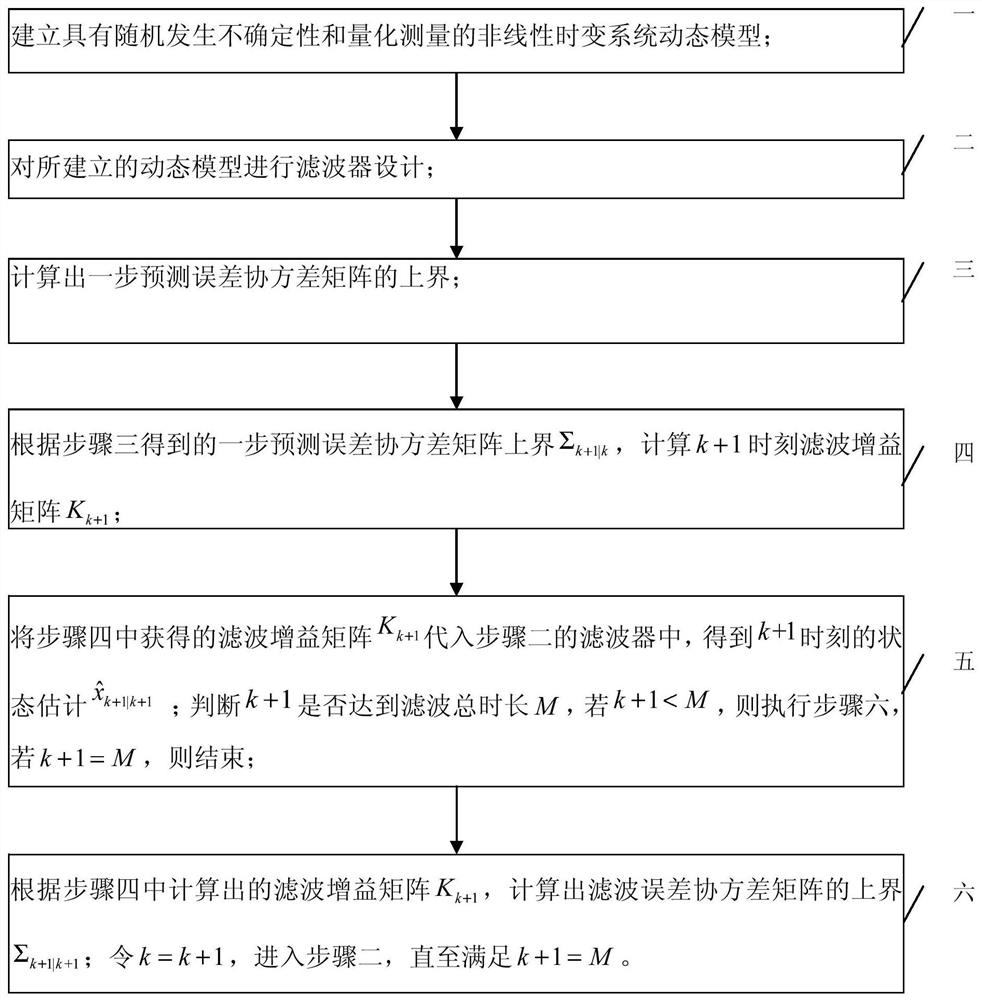
[0023] Specific implementation mode one: combine figure 1 The present embodiment is described. A non-linear filtering method with stochastic uncertainty and quantitative measurement provided in this embodiment specifically includes the following steps:
[0024] Step 1. Establishing a nonlinear time-varying system dynamic model with stochastic uncertainties and quantitative measurements;
[0025] Step 2, performing filter design on the dynamic model established in step 1;
[0026] Step 3. Calculate the upper bound Σ of the one-step forecast error covariance matrix according to the one-step forecast error and mathematical processing method k+1|k ;
[0027] Step 4. According to the upper bound Σ of the one-step forecast error covariance matrix obtained in step 3 k+1|k , calculate the filter gain matrix K at time k+1 k+1 ;
[0028] Step five, the filter gain matrix K obtained in step four k+1 Substitute into the filter in step 2 to get the state estimation at time k+1
[...
specific Embodiment approach 2
[0031] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the state space form of the nonlinear time-varying system dynamic model with stochastic uncertainty and quantitative measurement described in step 1 is:
[0032] x k+1 =(A k +α k ΔA k )x k +f(x k ,ξ k )+B k ω k (1)
[0033] the y k =C k x k +ν k (2)
[0034] where x k is the state vector in the dynamic model of the nonlinear time-varying system at time k, x k+1 is the state vector in the dynamic model of the nonlinear time-varying system at time k+1; y k is the measurement output vector of the system at time k; A k is the system matrix of the nonlinear time-varying system at time k, B k is the noise distribution matrix of the nonlinear time-varying system at time k, C k is the measurement matrix of the nonlinear time-varying system at time k, A k , B k and C k is a known matrix; ξ k is a Gaussian white noise sequence with zero mean; ω k is the expecta...
specific Embodiment approach 3
[0037] Specific embodiment three: the difference between this embodiment and specific embodiment two is that the specific process of filter design described in step two includes:
[0038] First, for the measured output y k Quantize to get q(y k ):
[0039] Where q(·) means to quantify ·, q j Indicates the jth component of q, is the vector y k The jth component of , is the jth logarithmic quantizer; j=1,2,...,m;
[0040] After being processed by the quantizer, the measured values received at the filter end are:
[0041]
[0042] Among them, Λ k :=diag{λ k,1 ,λ k,2 ,...,λ k,m}, λ k,j is a random variable that obeys the Bernoulli distribution, satisfying and in is lambda k,j The mathematical expectation of , Prob( ) represents the probability of occurrence of the event ;
[0043] Construct the following filter formula:
[0044]
[0045]
[0046] in, for x k The state estimation vector at time k, is the estimated value of the state at time k+1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More