

A Nonlinear Event-Triggered Filtering Method with Stochastic Modeling Errors
An event-triggered, stochastic modeling technology, applied in electrical components, adaptive networks, impedance networks, etc., can solve problems such as large filtering errors, and achieve the effect of reducing the relative error of filtering, easy to solve and implement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
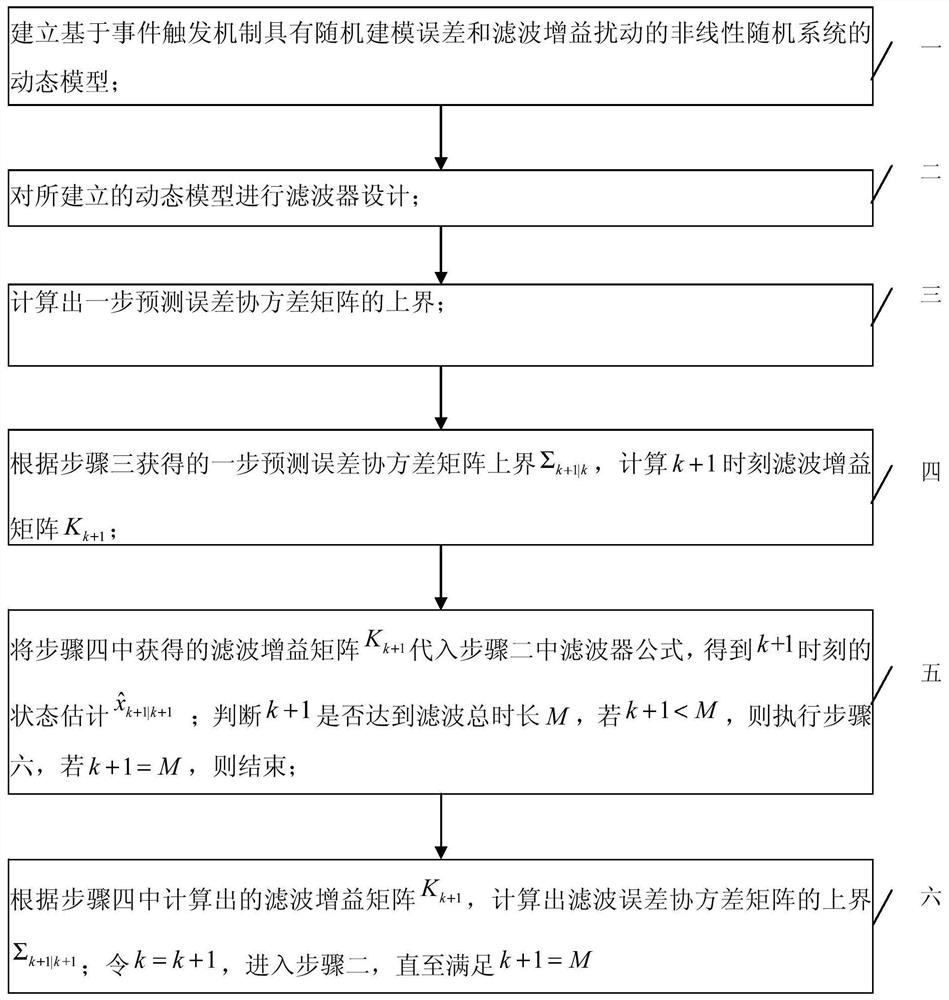
[0020] Specific implementation mode one: combine figure 1 The present embodiment is described. A non-linear event-triggered filtering method with random modeling error provided in this embodiment specifically includes the following steps:
[0021] Step 1. Establishing a dynamic model of a nonlinear stochastic system with random modeling errors and filter gain disturbances based on an event-triggered mechanism;
[0022] Step 2, performing filter design on the dynamic model established in step 1;
[0023] Step 3, calculating the upper bound of the one-step prediction error covariance matrix;
[0024] Step 4. According to the upper bound Σ of the one-step forecast error covariance matrix obtained in step 3 k+1|k , calculate the filter gain matrix K at time k+1 k+1 ;
[0025] Step five, the filter gain matrix K obtained in step four k+1 Substitute into the filter in step 2 to get the state estimation at time k+1
[0026] Judging whether k+1 reaches the total filtering dura...
specific Embodiment approach 2
[0028] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the state space form of the dynamic model of the nonlinear stochastic system with random modeling error and filter gain disturbance based on the event-triggered mechanism described in step 1 is:
[0029]
[0030] the y k =C k x k +ξ k E. k ψ(x k )+ν k (2)
[0031] where x k is the state variable of the dynamic model of the nonlinear stochastic system at time k, x k+1 is the state variable of the dynamic model of the nonlinear stochastic system at time k+1; y k is the measurement output of the system at time k; A k is the system matrix of the nonlinear stochastic system at time k, B k is time k The coefficient matrix of C k is the measurement matrix of the nonlinear stochastic system at time k, D k is the noise distribution matrix of the nonlinear stochastic system at time k, E k ψ(x k ) coefficient matrix, A k ,B k ,C k ,D k ,E k are known matrices; ...
specific Embodiment approach 3
[0033] Specific embodiment three: the difference between this embodiment and specific embodiment two is that the specific process of filter design described in step two includes:
[0034] First, select the following event trigger function:
[0035]
[0036] In the formula, Indicates the measured value at the last trigger moment, k i is the previous triggering moment corresponding to the current k moment, the superscript T represents transposition, and δ is a triggering threshold, which is a known positive scalar; then the next triggering moment sequence is iteratively generated by the following formula:
[0037]
[0038] Among them, Z + is a positive integer, inf{} is the lower limit function;
[0039] The measurements passed to the filter after the event trigger mechanism are:
[0040]
[0041] Construct filter formula:
[0042]
[0043]
[0044] in, for x k The estimate at time k, is the state estimate at time k+1, for x k For a one-step forecast ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More