Partially-decoupled two-degree-of-freedom movement parallel mechanism
A degree of freedom, partial solution technology, applied in the field of robotics, can solve the problems of limited number of two-degree-of-freedom mobile decoupling parallel mechanisms, unfavorable processing and assembly, and difficulty in engineering realization, achieving good kinematic performance, low work center of gravity, Small error effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
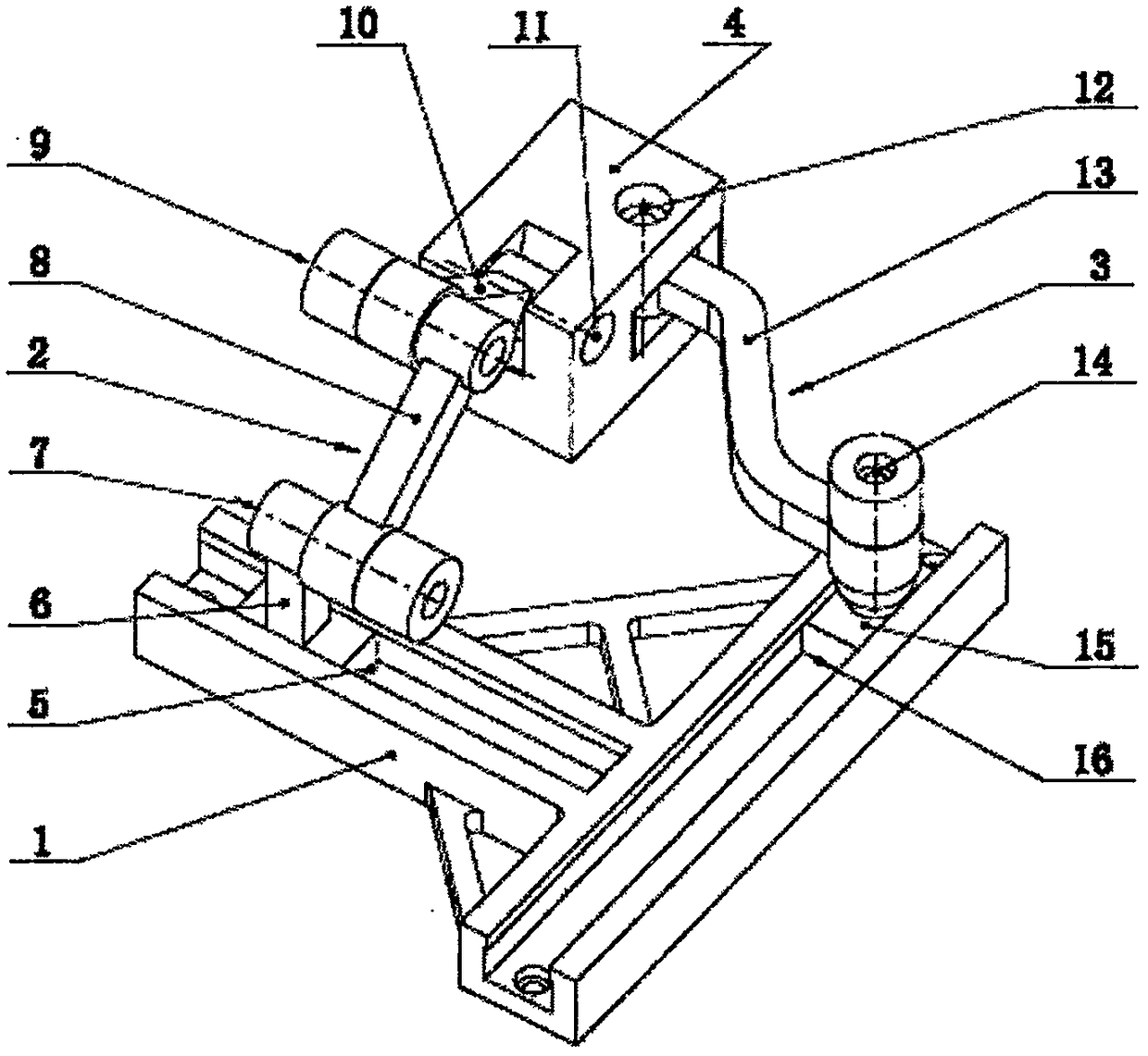
[0018] like figure 1 As shown, the partially decoupled two-degree-of-freedom mobile parallel mechanism of the present invention includes a moving platform 4, a fixed platform 1, and a first movement branch 2 and a second movement branch 3 respectively fixed between the movement platform 4 and the fixed platform 1 ; The first movement branch 2 includes the mobile pair P 1 5. The first slider 6. Rotating pair R 1 7. The first connecting rod 8, the rotating pair R29, the second connecting rod 10 and the rotating pair R 3 11. The second connecting rod 10 passes through the rotating pair R 3 11 is connected with the motion platform 4, and the revolving pair R 2 9 connects the second connecting rod 10 and the first connecting rod 8, and the rotating pair R 1 7 connects the first connecting rod 8 and the first slider 6, and the first slider 6 passes through the moving pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



