

Mechanical arm grabbing method and system
A technology of manipulators and manipulators, applied in the field of robotics, can solve problems such as reduced service life of manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with specific embodiments and with reference to the drawings. The same reference numerals indicate the same components, unless otherwise specified. It should be emphasized that the following description is only exemplary, and is not intended to limit the scope of the present invention and its application.
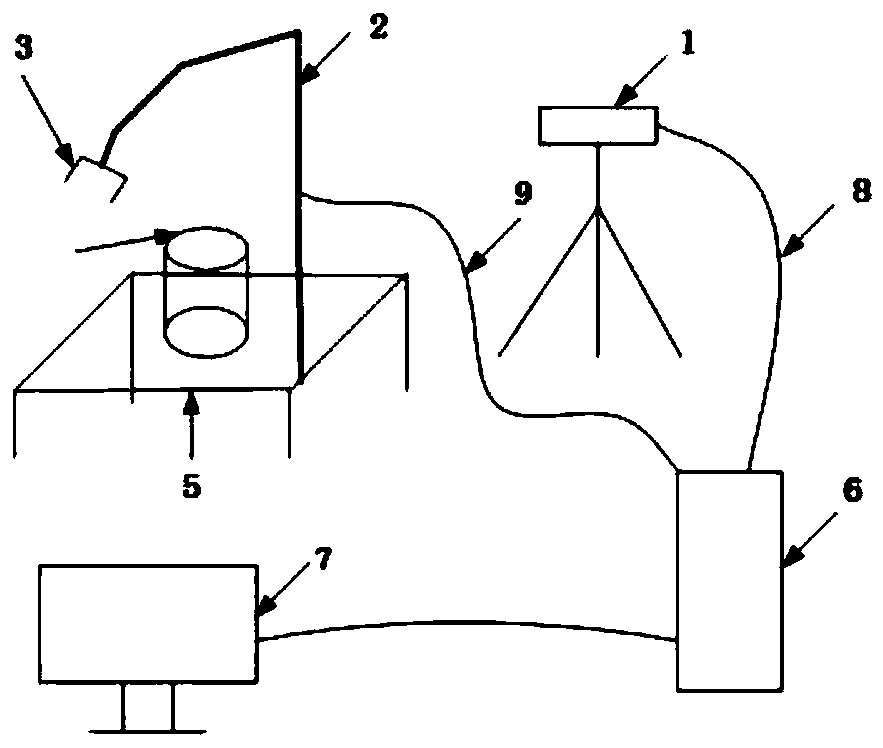
[0029] Such as figure 1 , The robotic arm grasping system of this embodiment includes an RGB-D observation camera 1, a central controller (desktop computer) equipped with an ubuntu operating system (a Linux operating system) 6, a robotic arm 2, a two-finger parallel gripper 3 , figure 1 Middle 8 and 9 respectively represent the data transmission line between the observation camera, the robotic arm and the controller. 7 is the debugging interface of the central controller for easy interaction. 4 is the object to be grasped, and 5 is the supporting surface where the object is to be grasped.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More