

Foot-type robot knee joint with embedded integrated electro-hydraulic actuator
An integrated electro-hydraulic and actuator technology, applied in the field of biped robots and exoskeleton robots, can solve the problems of large moment of inertia, heavy structure, inconvenient control, etc., to avoid the impact of too fast/emergency stop of the mechanism, reduce the Effect of weight and moment of inertia, avoidance of quick/emergency stop shocks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
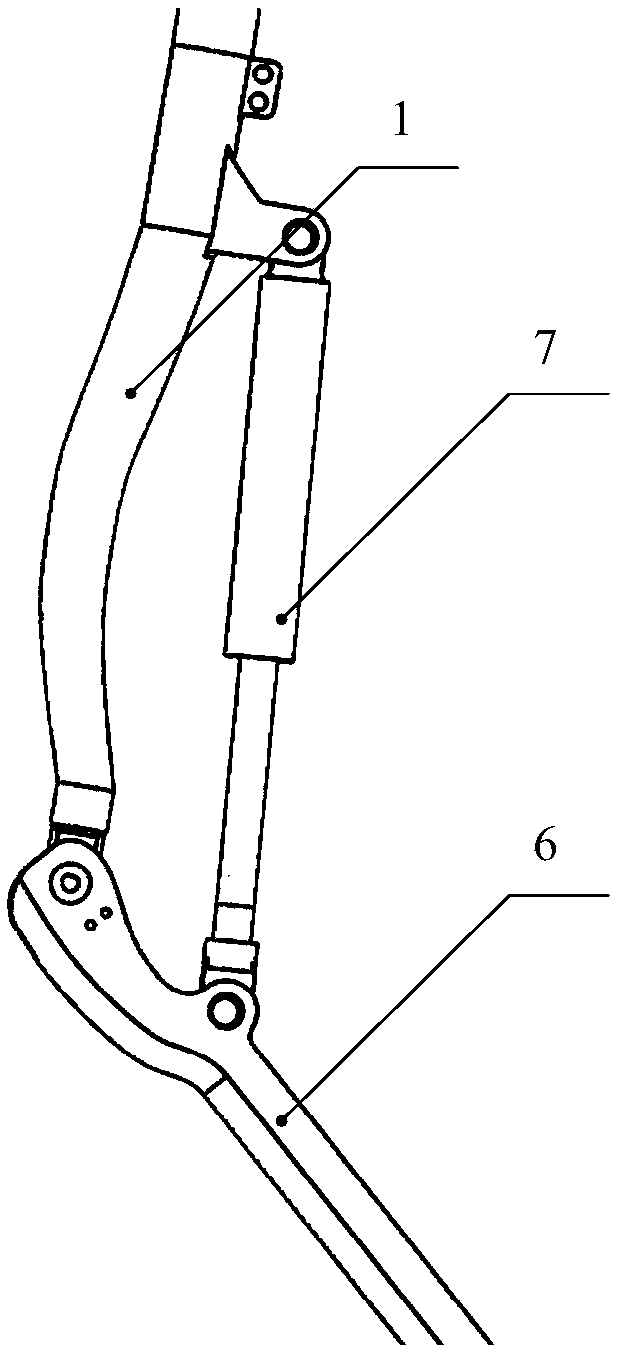
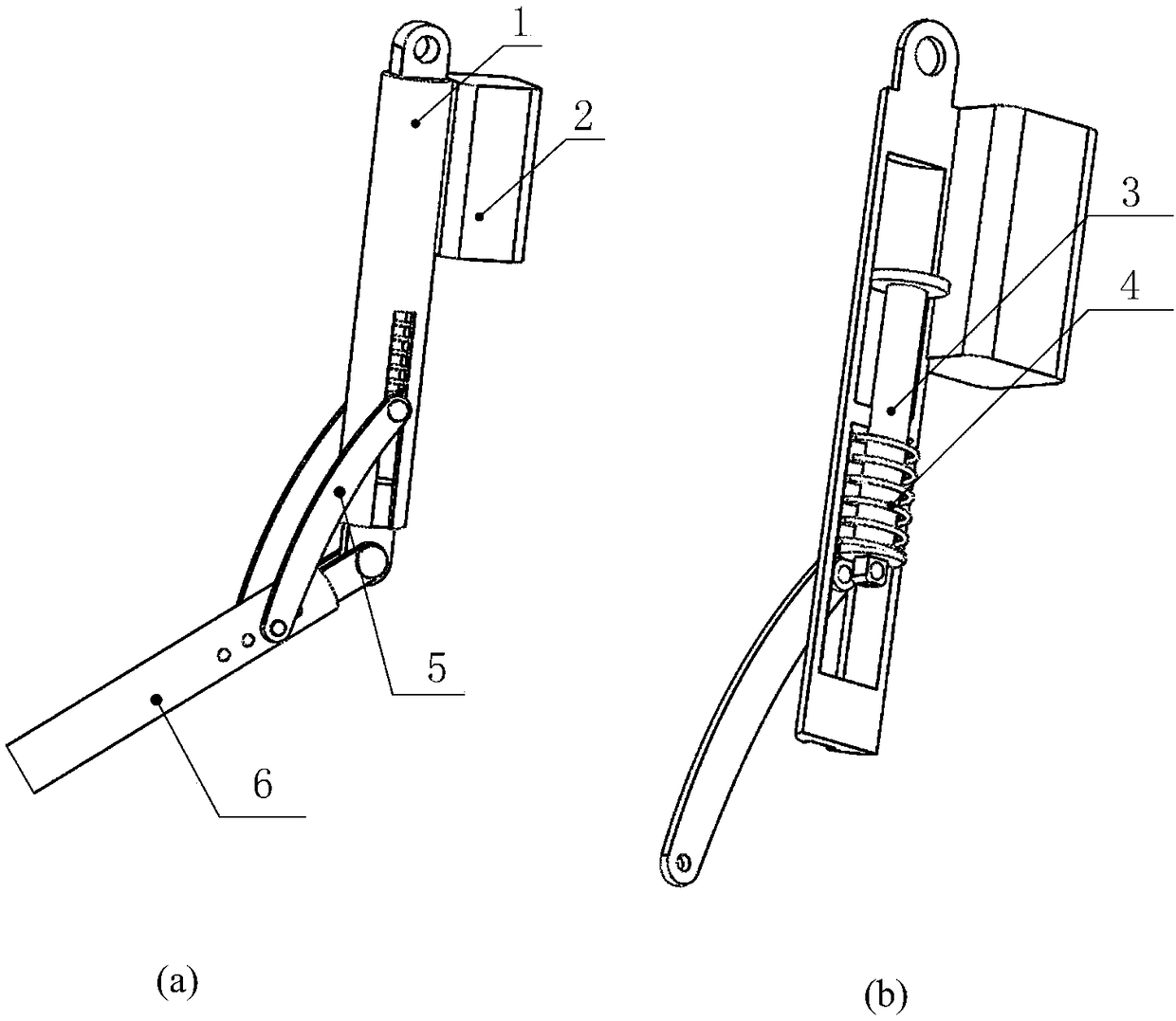
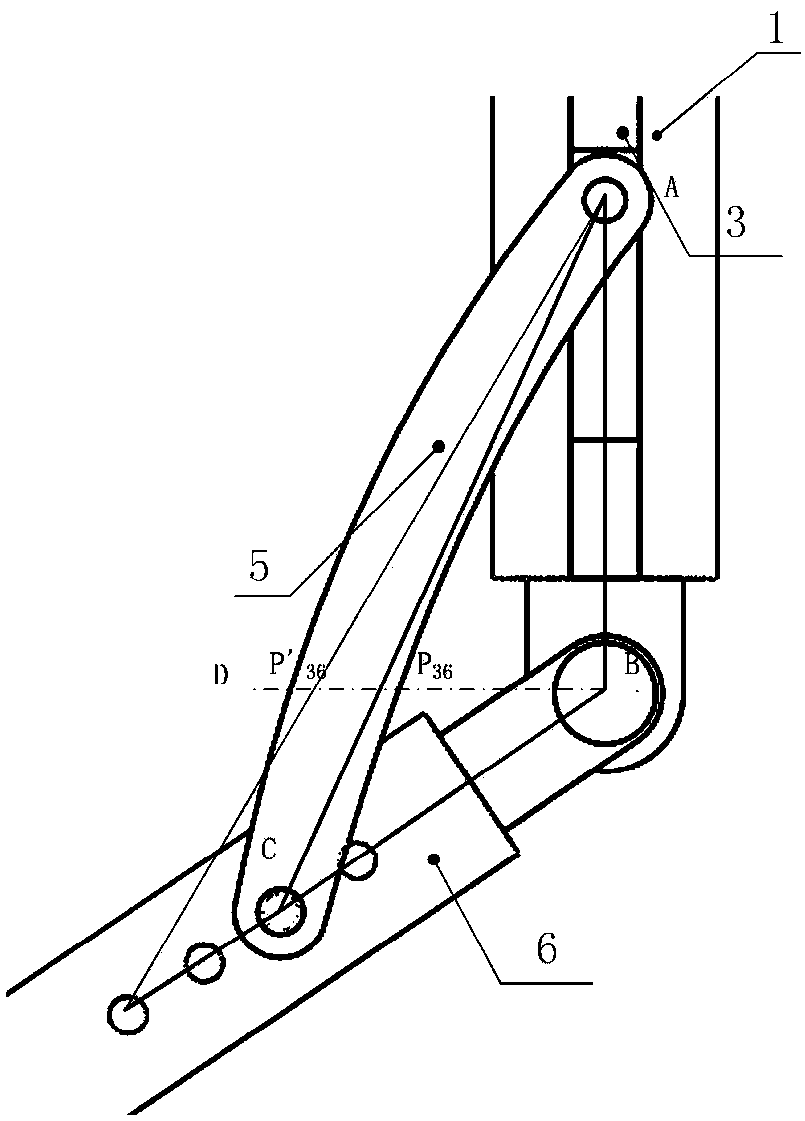
[0023] like figure 2 As shown in (a) and (b), it includes a thigh rod 1 and a calf rod 6, the lower end of the thigh rod 1 is hinged to the upper end of the calf rod 6, and also includes an integrated electro-hydraulic actuator 2, a piston rod 3, a spring 4 and a connecting rod 5 An integrated electro-hydraulic actuator 2 is installed on the thigh rod 1, and the hydraulic cylinder of the integrated electro-hydraulic actuator 2 is embedded in the upper part of the thigh rod 1 as the upper cavity, and the lower part of the thigh rod 1 is hollow to form a cavity as the lower cavity. The rod 1 is equipped with a piston rod 3, the upper end of the piston rod 3 is located in the upper cavity, the lower end of the piston rod 3 is located in the lower cavity, and the middle part of the piston rod 3 is set in the step hole between the upper cavity and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More