

An Optimal Landmark Selection Method for Planetary Landing Optical Navigation
An optical navigation and road sign technology, which is applied in the directions of combined navigators and navigation calculation tools, can solve the problems of complicated and complicated calculations, and achieve the effect of high optimization quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] In order to better illustrate the purpose and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and examples.
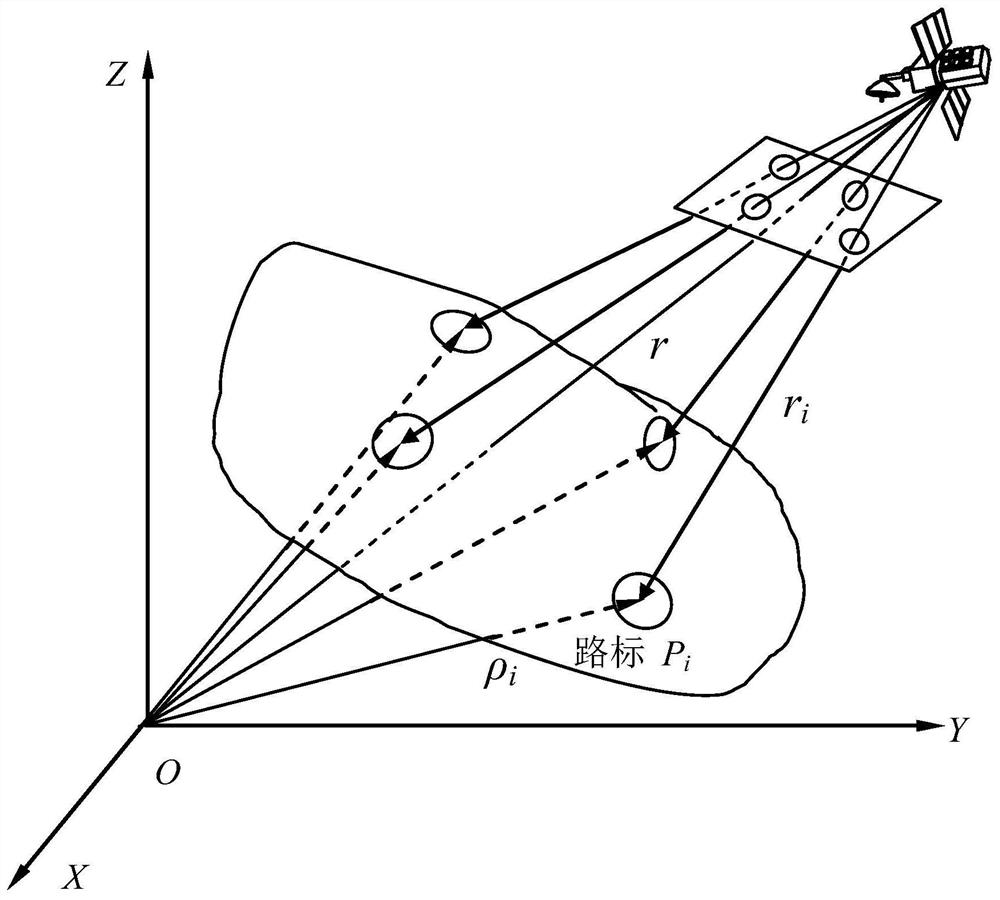
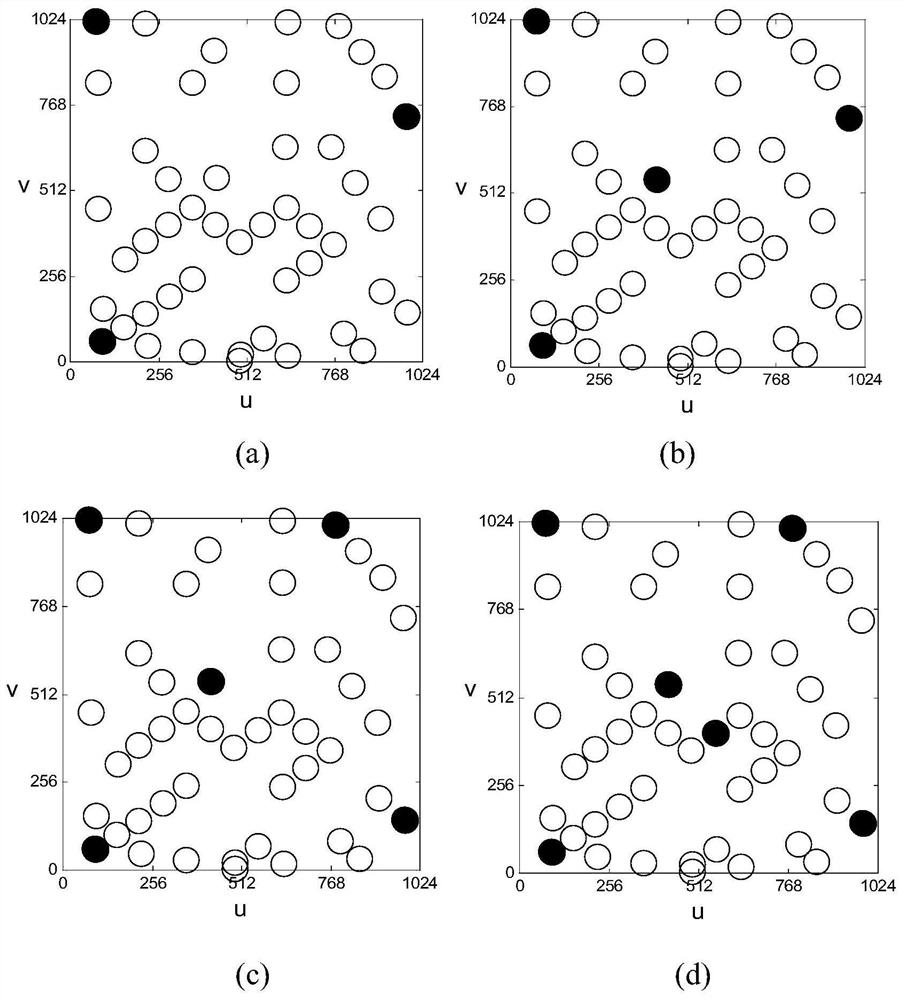
[0082] Let the distance between the probe and the surface of the planet be 7000m, the field of view of the navigation camera be 30°, and the navigation camera capture 47 navigation landmarks.
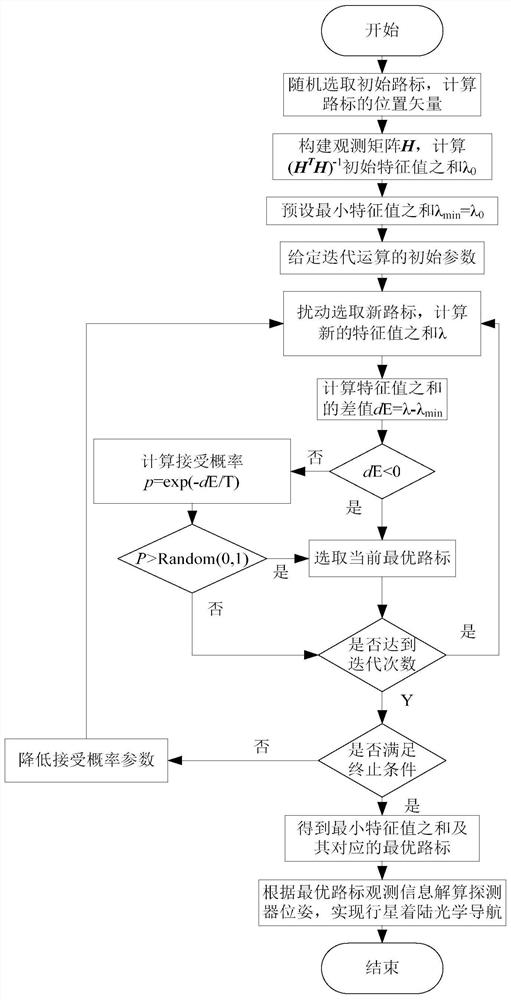
[0083] Due to the observation noise contained in the captured navigation landmark pixels and image line coordinates, and the existence of errors in determining the position of navigation landmarks, there must be errors in determining the position and attitude of the detector using the pixel information of navigation landmarks. In the following, through the analysis of the observation matrix, the objective function of the landmark optimization algorithm is obtained, and then the selection method of the optimal navigation landmark is given.
[0084] Note that for the least squares probl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More