

Machining track real-time planning method and device based on non-uniform B-splines
A technology for processing trajectories and non-uniformity, which is applied in the direction of instruments, computer control, simulators, etc., can solve the problems of spline trajectories that cannot be delivered for interpolation, occupy more system resources, and data starvation, so as to solve data starvation and avoid solving problems , the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 2 example
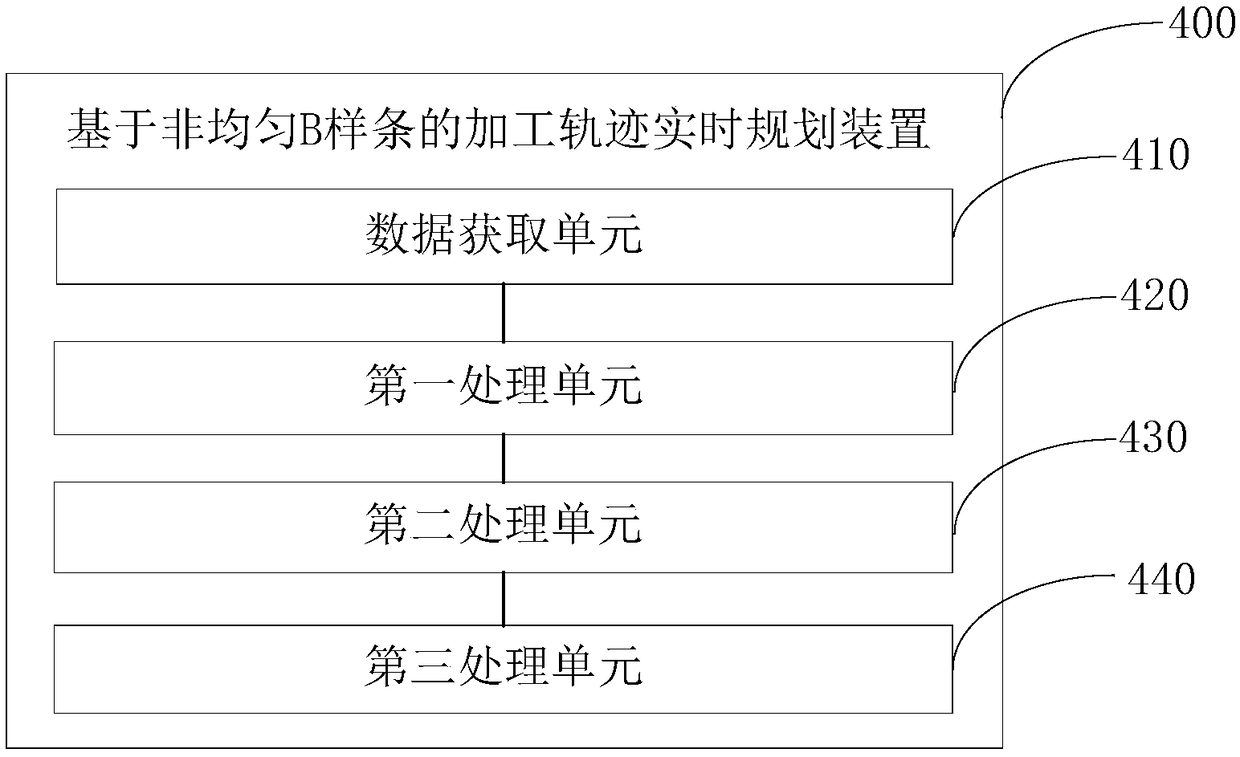
[0042] Corresponding to the non-uniform B-spline based processing trajectory real-time planning method in the first embodiment, image 3 It shows a one-to-one correspondence real-time planning device for processing trajectory based on non-uniform B-spline using the method for real-time planning of processing trajectory based on non-uniform B-spline shown in the first embodiment. Such as image 3 As shown, the non-uniform B-spline based processing trajectory real-time planning device 400 includes a data acquisition unit 410 , a first processing unit 420 , a second processing unit 430 and a third processing unit 440 . Among them, the implementation functions of the data acquisition unit 410, the first processing unit 420, the second processing unit 430, and the third processing unit 440 are in one-to-one correspondence with the corresponding steps in the first embodiment. a detailed description.
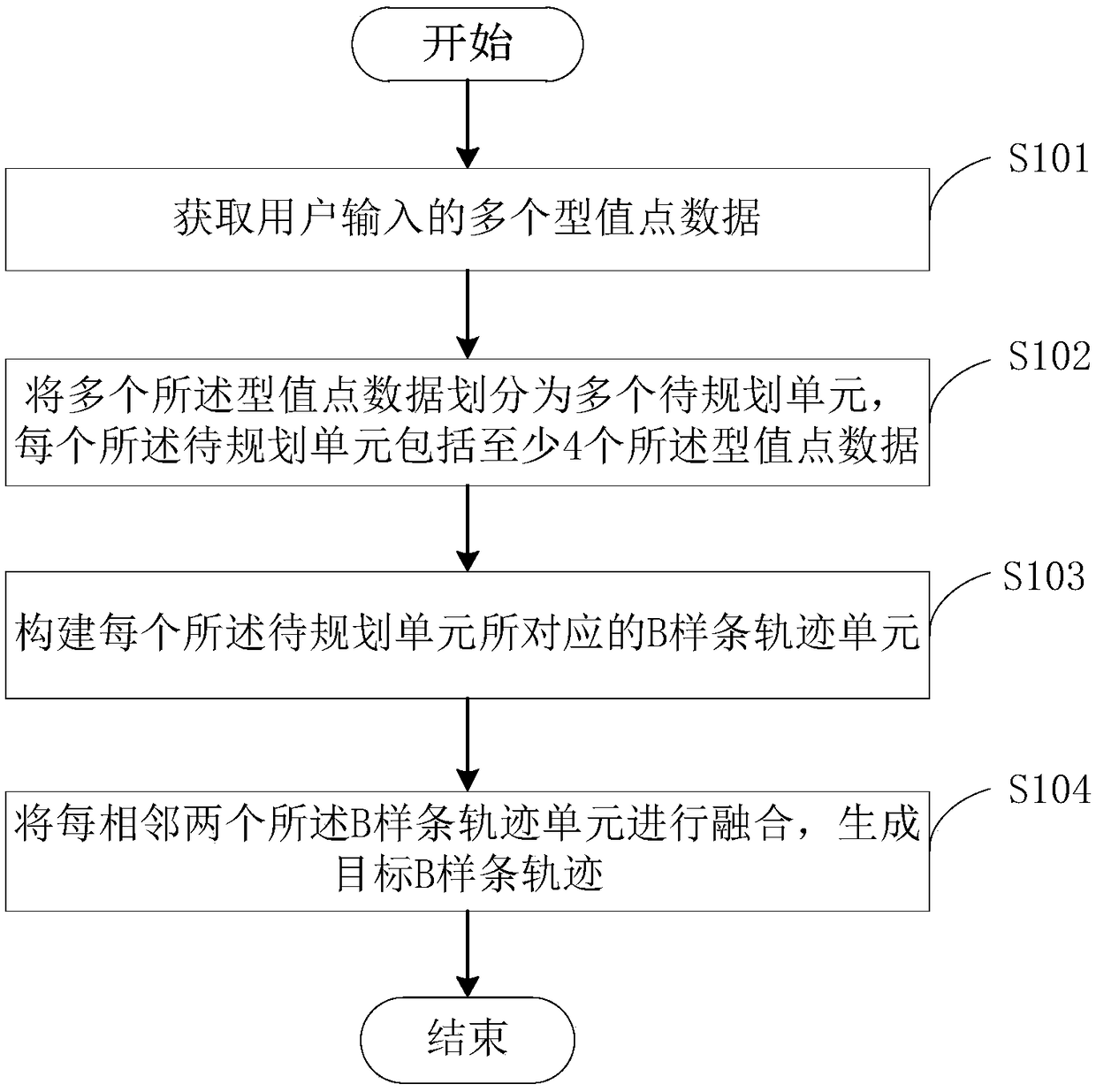
[0043] The data acquiring unit 410 is configured to acquire multiple type point ...
no. 3 example
[0052] Such as Figure 4 As shown, is a schematic diagram of a terminal device 300 . The terminal device 300 includes a memory 302, a processor 304, and a computer program 303 stored in the memory 302 and operable on the processor 304. When the computer program 303 is executed by the processor 304, the first implementation is realized. The real-time planning method of machining trajectory based on non-uniform B-spline in the example, in order to avoid repetition, will not be repeated here. Alternatively, when the computer program 303 is executed by the processor 304, it realizes the functions of each model / unit in the non-uniform B-spline based machining trajectory real-time planning device of the second embodiment. To avoid repetition, details are not repeated here.
[0053] Exemplarily, the computer program 303 can be divided into one or more modules / units, and one or more modules / units are stored in the memory 302 and executed by the processor 304 to implement the present ...
no. 4 example
[0059] An embodiment of the present invention also provides a storage medium, on which instructions are stored. When the instructions are run on a computer, the computer program is executed by a processor to implement the non-based In order to avoid repetition, the real-time planning method of machining trajectory of uniform B-spline will not be repeated here. Alternatively, when the computer program is executed by the processor, the functions of each model / unit in the non-uniform B-spline-based real-time planning device for machining trajectory described in the second embodiment are realized. To avoid repetition, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More