

Second order sliding mode control method for autonomous vehicle based on visual dynamics
A second-order sliding mode and automatic driving technology, which is applied in the direction of finding the target control, etc., can solve the problems of non-continuous control, lack of robustness, strong chattering caused by first-order sliding mode control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be further described in detail below in conjunction with the accompanying drawings.
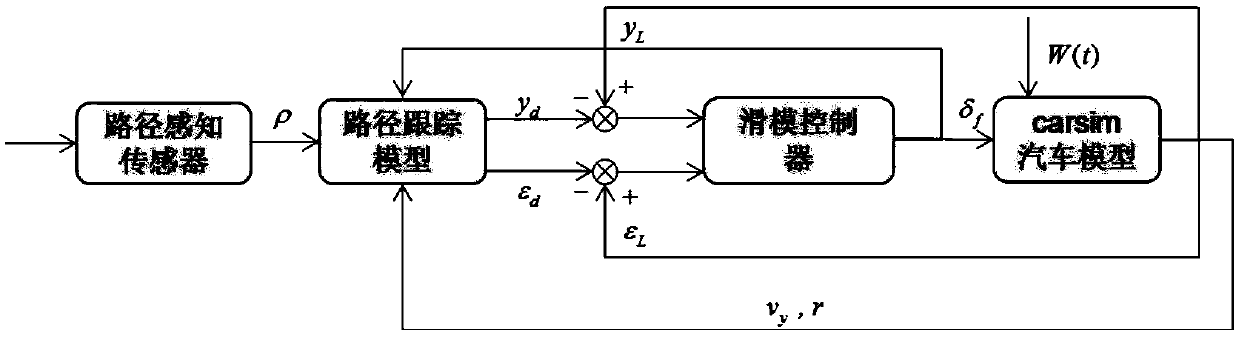
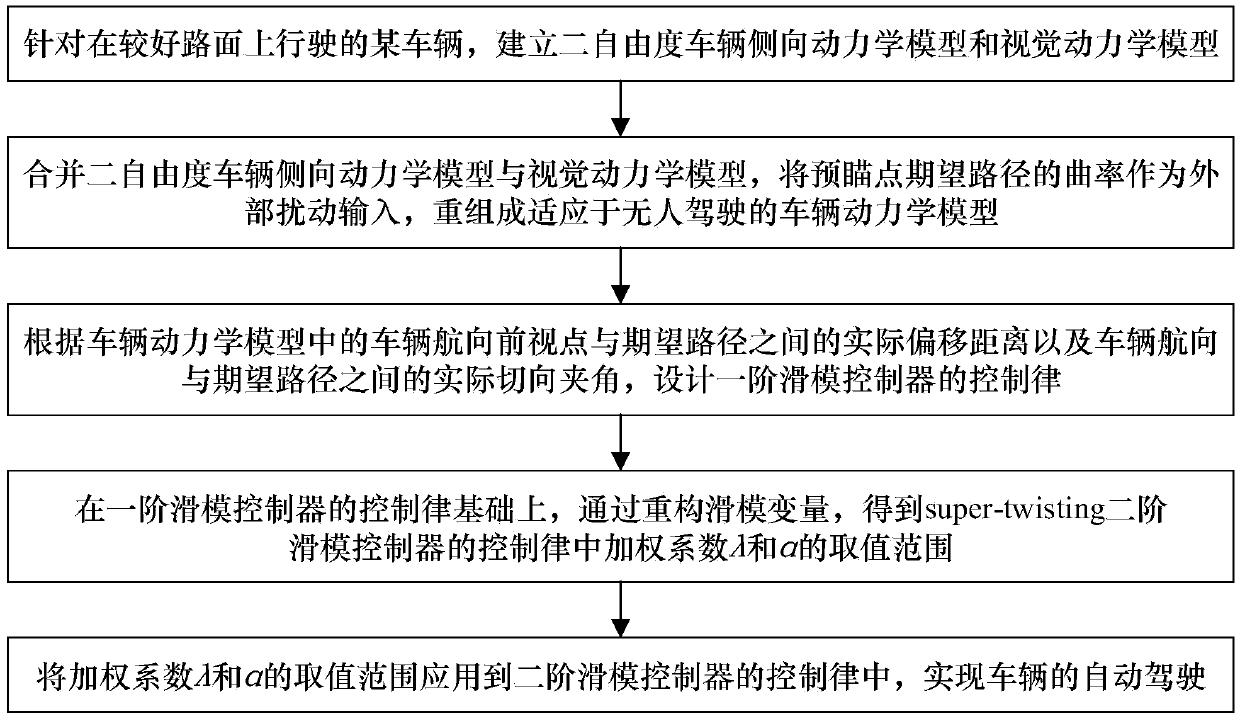
[0081] The present invention conducts research on the sliding mode controller of the unmanned vehicle based on the predicted path. According to the dynamic state of the intelligent vehicle in actual operation, the visual dynamics is combined with the two-degree-of-freedom vehicle dynamics model, and a first-order sliding mode controller is designed to make the lateral deviation and azimuth deviation of the front view point reach an ideal state. The front wheel angles used to correct the vehicle state are then derived and used as input to control the vehicle to track the desired path stably. Finally, the control strategy of the super-twisting second-order sliding mode is designed to eliminate the chattering problem caused by the first-order sliding mode.
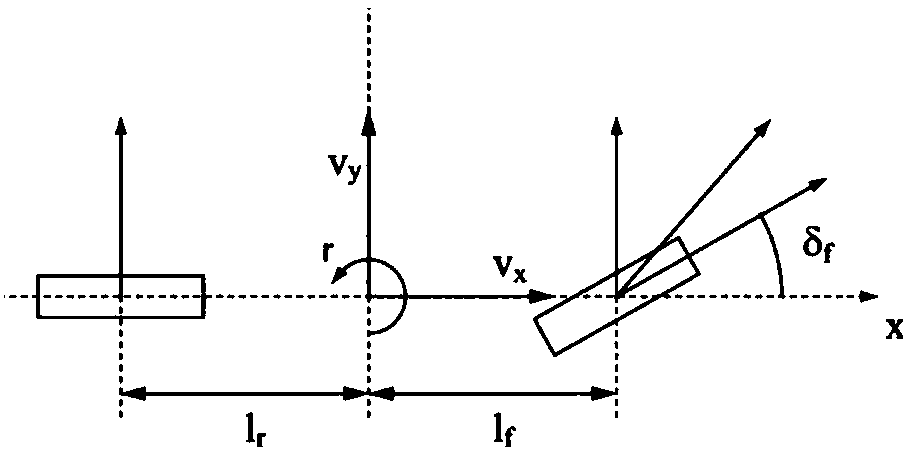
[0082] like figure 1 As shown, first, a brief analysis of the two-degree-of-freedom vehicle dynamics mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More