

Positioning equipment track optimizing and boundary extracting method and device thereof
A technology for positioning equipment and trajectory optimization, applied in the direction of measuring devices, satellite radio beacon positioning systems, instruments, etc., can solve problems such as low timeliness, high economic costs, abnormal data protrusions, etc., and achieve accurate ground object boundaries, The effect of solving a locally dense, efficient solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
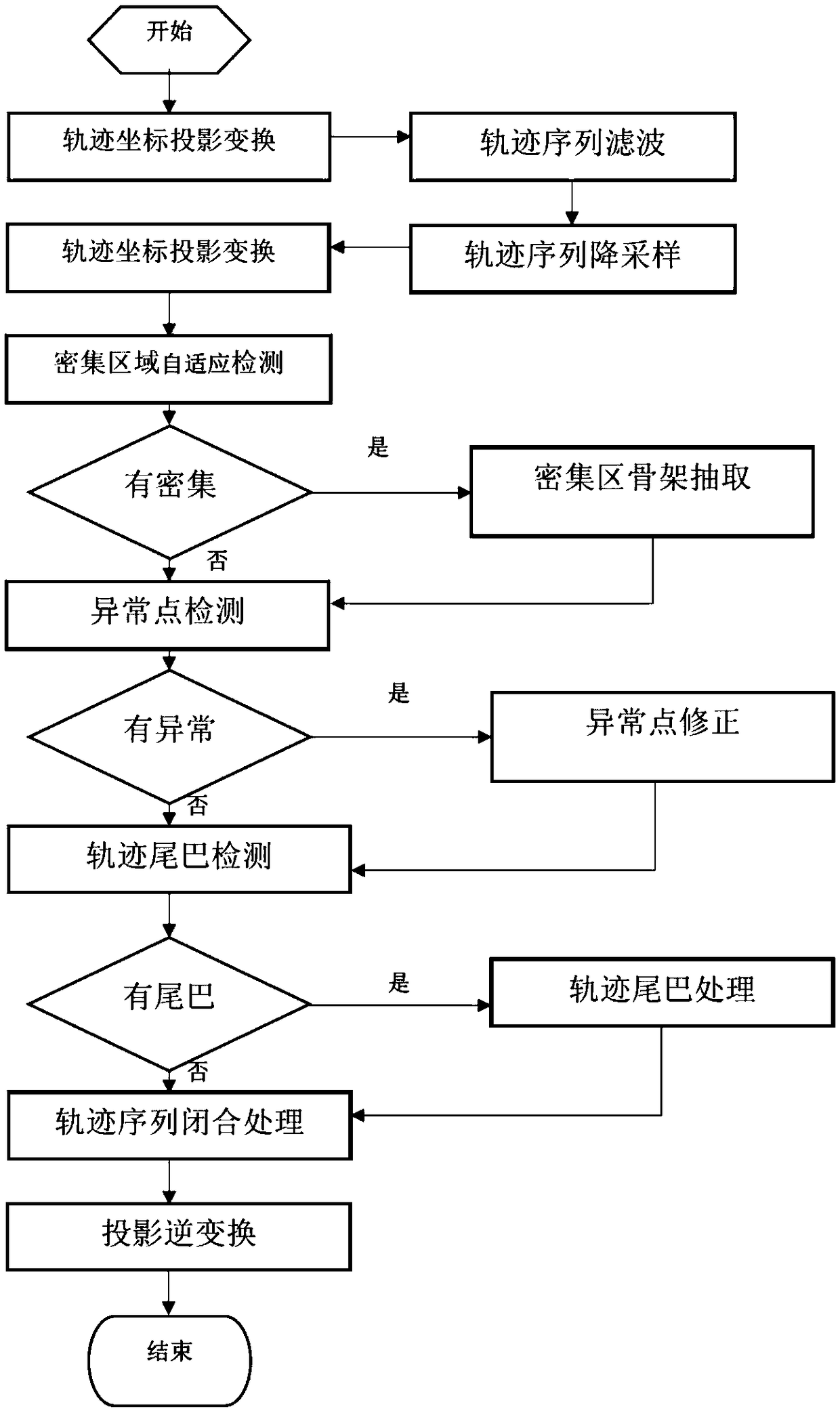
[0066] figure 1 It is a flow chart of the positioning device trajectory optimization and boundary extraction method of the present invention, including the following steps:
[0067] Step 1: Perform "trajectory coordinate projection transformation" processing on the original trajectory sequence output by the positioning device to obtain the coordinates in the plane coordinate system.
[0068] Since the original trajectory uses geographic coordinates to record the position (latitude and longitude), it is not conducive to geometric calculation and analysis. It is necessary to convert the geographic coordinates into plane coordinates. In order to ensure accuracy, the transverse Mercator projection method is usually used for coordinate transformation.
[0069] Step 2: Perform "trajectory sequence filtering" processing on the trajectory sequence after coordinate transformation to reduce accidental positioning errors and improve positioning accuracy.
[0070] In order to reduce the ...
Embodiment 2
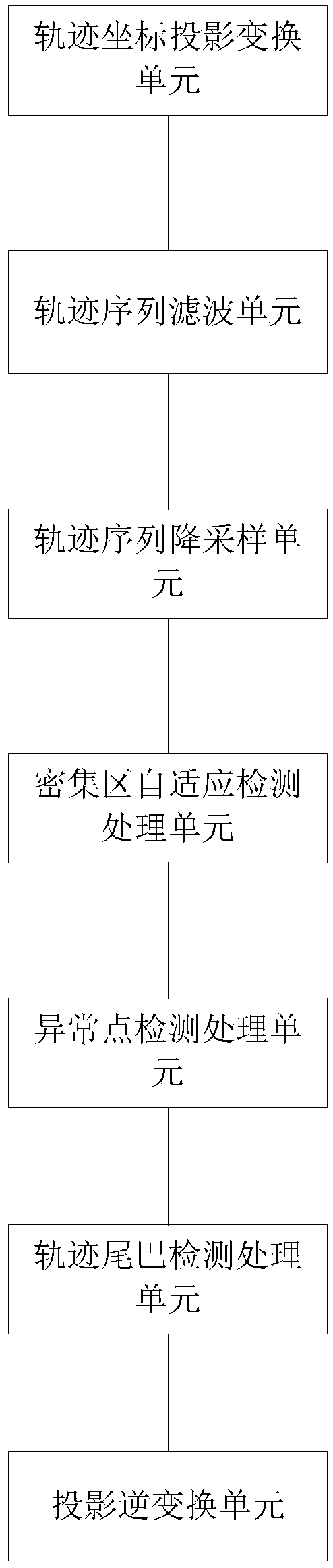
[0094] figure 2 It is a structural diagram of the positioning device trajectory optimization and boundary extraction device of the present invention, the device includes:
[0095] The trajectory coordinate projection transformation unit performs trajectory coordinate projection transformation processing on the original trajectory sequence output by the positioning device to obtain the coordinates in the plane coordinate system;
[0096] The trajectory sequence filtering unit performs trajectory sequence filtering processing on the trajectory sequence after the trajectory coordinate projection transformation;
[0097] The trajectory sequence downsampling unit performs trajectory sequence downsampling processing to remove some redundant trajectory points;
[0098]The dense area adaptive detection processing unit performs dense area adaptive detection processing on the track points after the down-sampling of the track sequence, and automatically identifies the track point dense...
Embodiment 3
[0103] The present invention also provides a memory, the memory stores a computer program, and the computer program is executed by the processor as follows:
[0104] Perform trajectory coordinate projection transformation processing on the original trajectory sequence output by the positioning device to obtain the coordinates in the plane coordinate system;
[0105] Perform trajectory sequence filtering processing on the trajectory sequence after trajectory coordinate projection transformation to reduce accidental positioning errors and improve positioning accuracy;
[0106] Perform trajectory sequence down-sampling processing to remove some redundant trajectory points;
[0107] Carry out adaptive detection processing of dense areas, and automatically identify dense areas of trajectory points: if dense areas are found, then perform dense area skeleton extraction processing, and obtain accurate trajectory trends in dense areas through dense area skeleton extraction processing; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More