

Central mode generator-based quadruped robot gait planning method
A quadruped robot and pattern generator technology, applied in the direction of instruments, attitude control, non-electric variable control, etc., to achieve the effect of reducing the rolling range, reducing the yaw angle, and reducing the pitching range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0038] The gait planning method of the quadruped robot based on the central pattern generator of the present embodiment is as follows: image 3 As shown in the figure, only the 3-way signal flow of the left front leg is drawn in the figure, and the signal flow of other legs is similar.
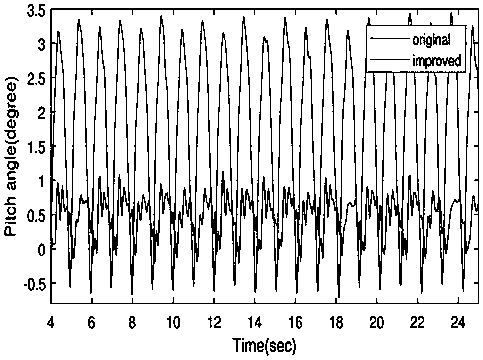
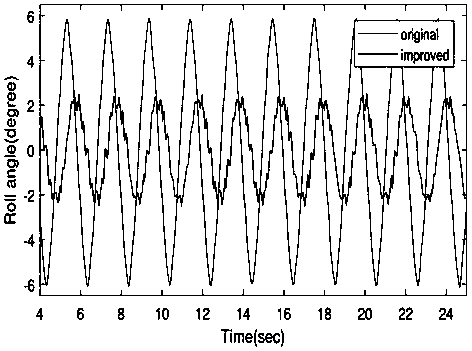
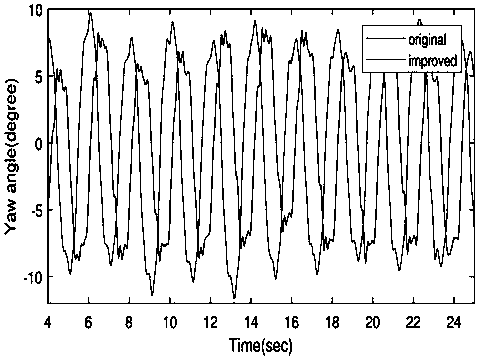
[0039] The quadruped robot system includes the quadruped robot body, the inertial measurement unit sensor, and the positioning sensor. The attitude angle, angular velocity and specific position of the body of the footed robot during the movement process. The attitude angle includes pitch angle, yaw angle and roll angle. is at 0, its amplitude is as small as possible, so the difference between the above attitude angles and the required zero value is reversed, and then the weighted summation is a part of the feedback signal. Likewise, the feedback signal of the positioning sensor is obtained.
[0040]The central pattern generator is a control system composed of nerve cells and specific connect...
specific Embodiment approach 2
[0057] In the gait planning method of the quadruped robot based on the central pattern generator of the present embodiment, the control signals of the three types of joints are as follows:
[0058] 1. Side swing joint signal:
[0059]
[0060] Among them, θ lsi Indicates the drive signal of the side swing joint of the i-th leg, A i is a constant, sign(ζ) is a sign function, and when the i-th leg represents the left front or left rear leg, ζ≤0, y i Represents one original output signal of the hopf oscillator network. Numbers 1, 2, 3, and 4 represent the left front leg, right front leg, left rear leg, and right rear leg, respectively.
[0061] Note: y i ≤0, indicating that the leg is in the swing phase.
[0062] 2. Hip joint signal:
[0063]
[0064] where x i is an output of the hopf oscillation network (with the y in the side swing joint signal i different road), k i is a constant that determines the swing speed of the upper limb of each leg of the quadruped rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More