

Three-dimensional object recognition system and method based on laser radar and monocular vision
A laser radar and 3D target technology, applied in the field of computer vision, can solve problems such as difficulty in 3D point cloud target recognition, and achieve wide applicability, robustness, and high recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] This embodiment is a 3D target recognition system applied to a robot vision system, which acquires a scene image from a monocular camera, recognizes the target and inversely calculates its spatial position in the 3D point cloud acquired by the laser radar, thereby providing the scene for the robot The spatial location information of the target.
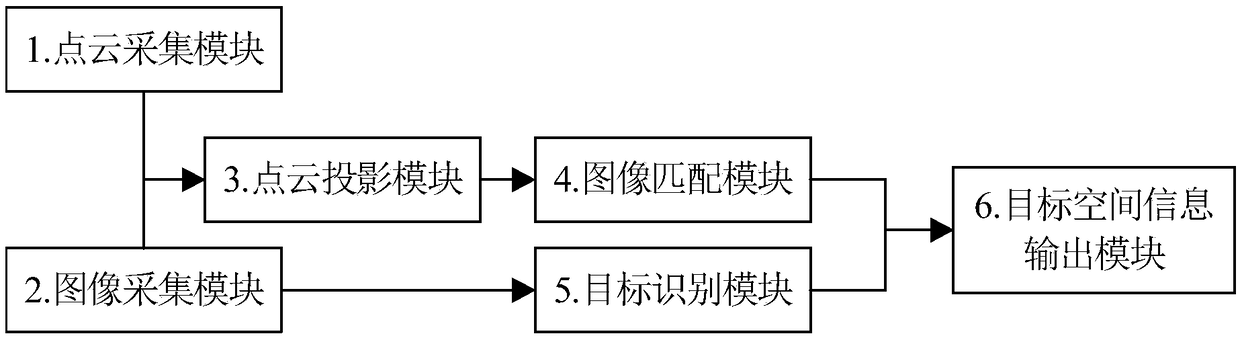
[0046] Such as figure 1 As shown, the 3D target recognition system mainly includes the following six modules:
[0047] 1. Point cloud acquisition module. This module is responsible for acquiring the 3D point cloud of the scene from LiDAR.
[0048] 2. Image acquisition module. This module is responsible for getting the scene image from the camera.
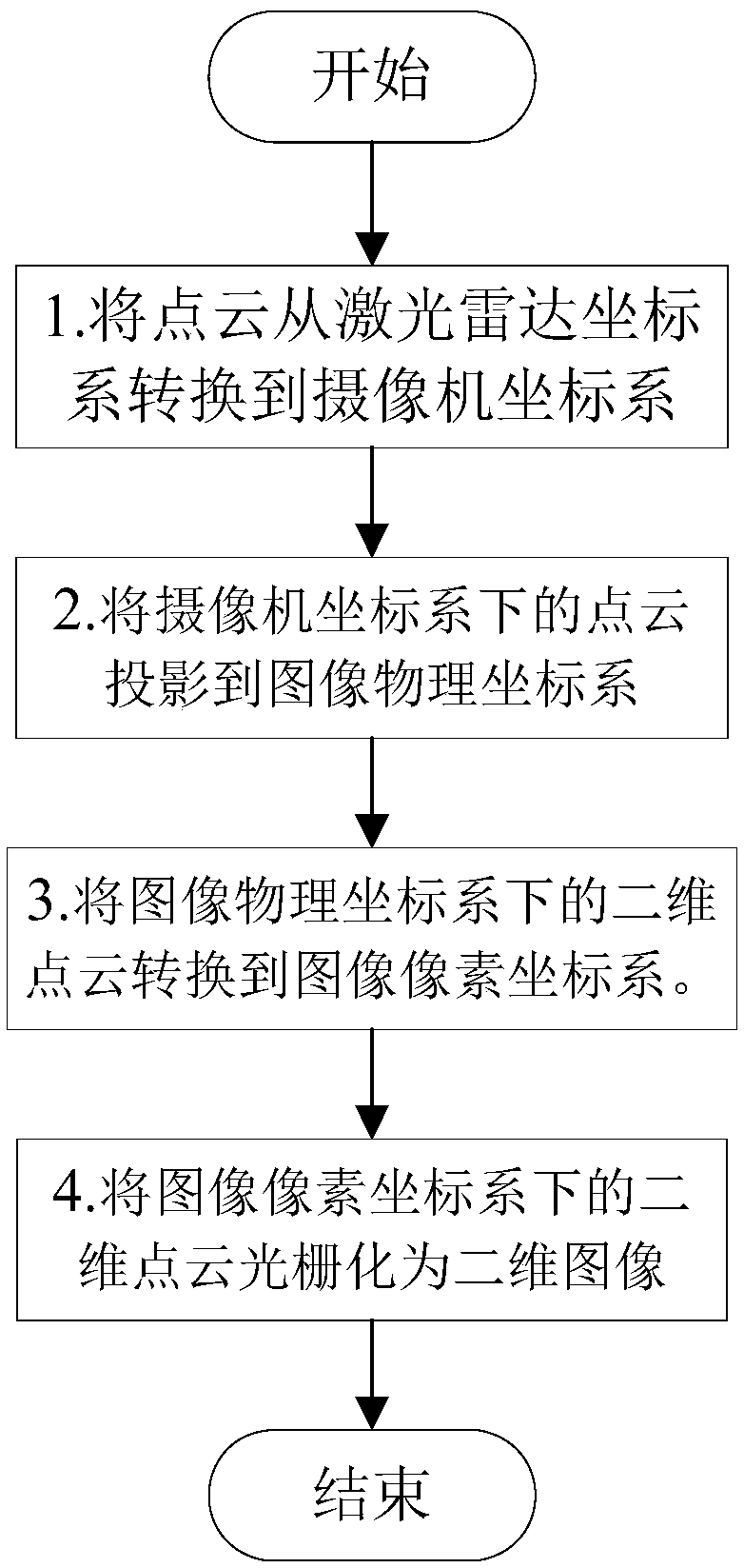
[0049] 3. Point cloud projection module. This module is responsible for projecting the 3D point cloud of the scene acquired by the lidar. The purpose of the projection is to obtain a 2D image that can be directly matched with the subsequent modules.
[0050] 4. Image matching m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More