

Industrial robot suitable for use in machinery production workshop
A technology for industrial robots and production workshops, applied in manipulators, mechanical roughness/irregularity measurement, manufacturing tools, etc., can solve problems such as inconvenient use, slow detection efficiency, poor detection effect, etc. Troubleshooting effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
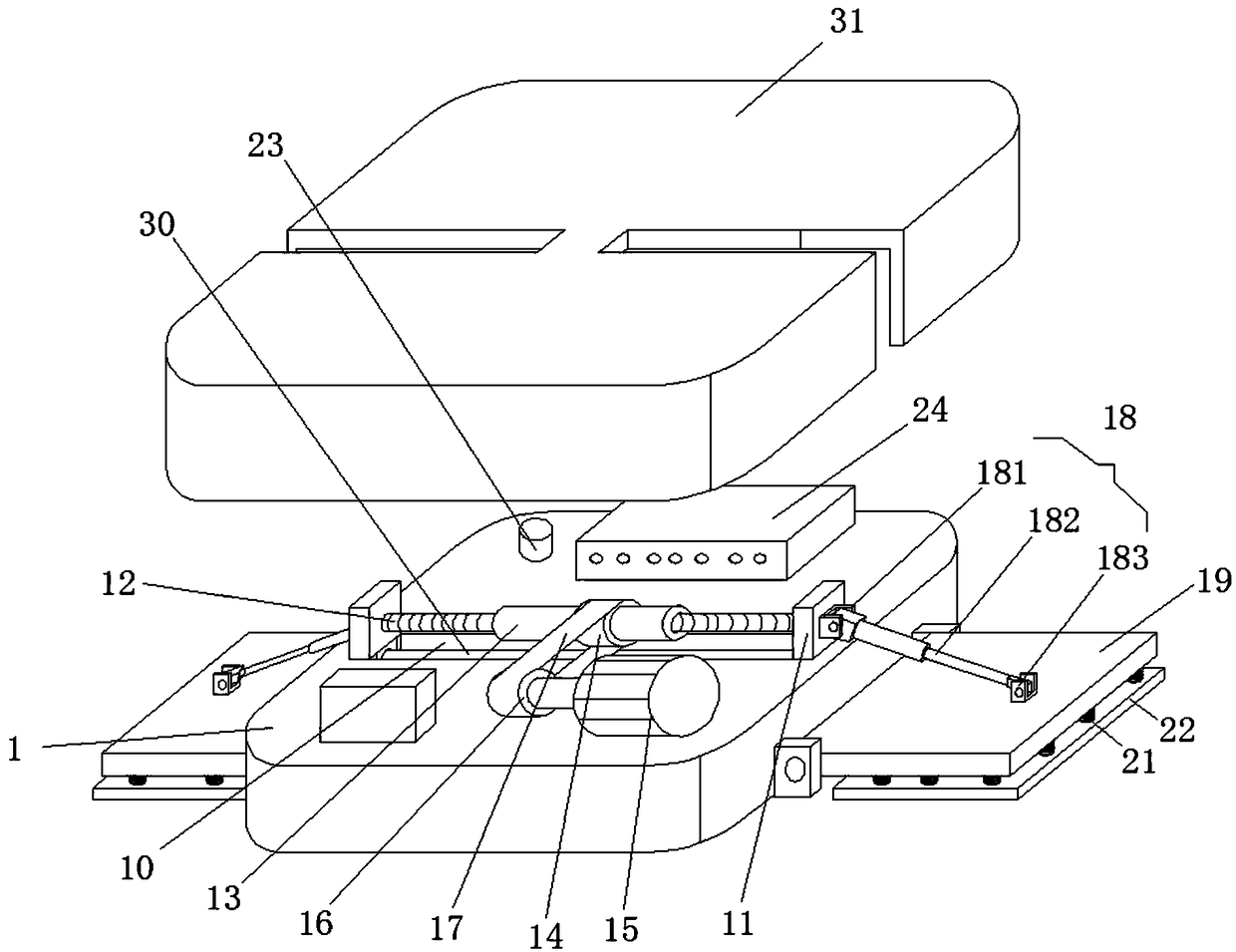
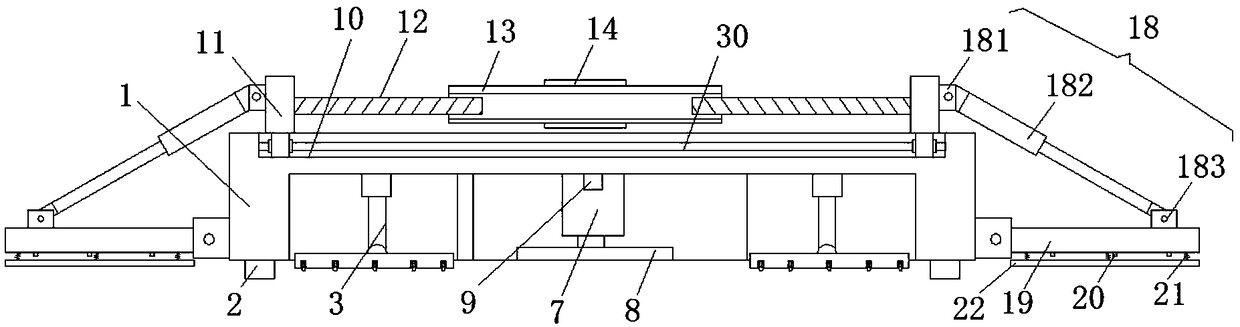
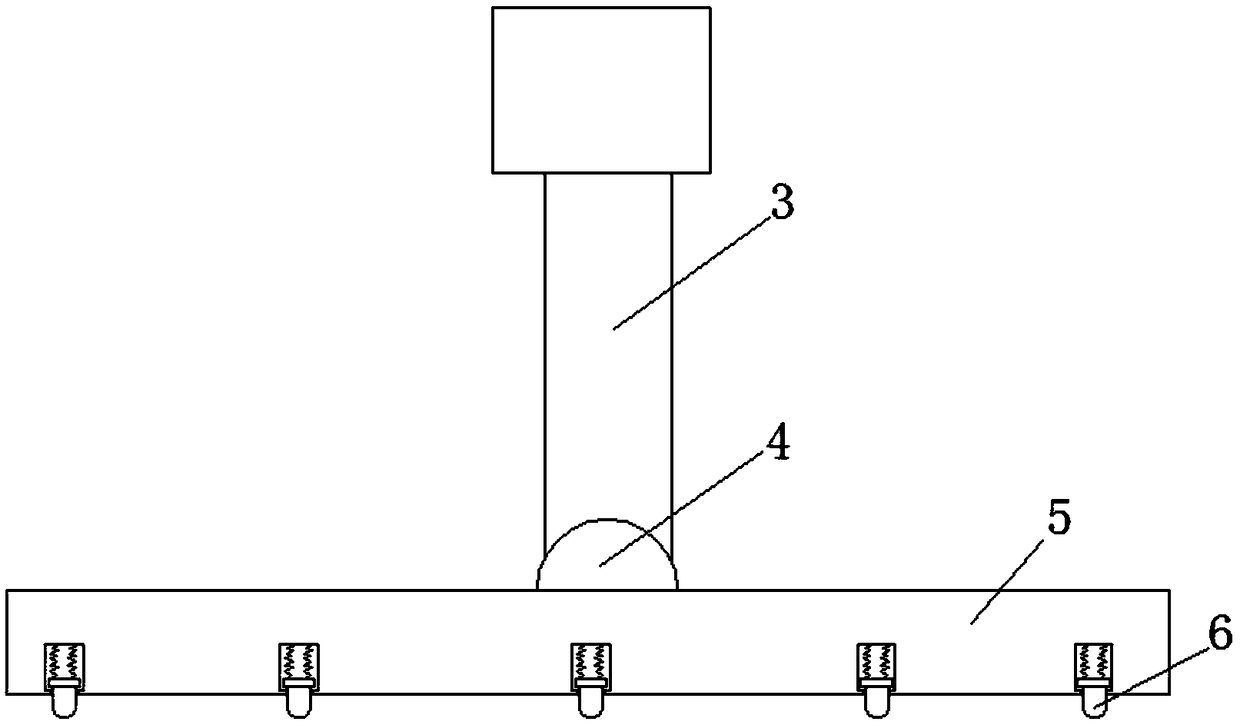
[0022] see Figure 1-4 , this embodiment provides an industrial robot suitable for use in machinery production workshops, including a housing 1, a drive wheel 2 is provided at the bottom of the housing 1, and a first push rod 3 is fixedly connected to the top of the inner wall of the housing 1, The bottom of the first push rod 3 is fixedly connected with the first hinged seat 4, the bottom of the first hinged seat 4 is hinged with the detection plate 5, the bottom of the detection plate 5 is provided with a movable column 6, and the top of the inner wall of the housing 1 is fixedly connected with the first hinged seat 4. Two push rods 7, the bottom of the second push rod 7 is movably connected with a marking brush plate 8, the front of the second push rod 7 is provided with a speed sensor 9, the top of the housing 1 is provided with a sliding groove 10, and the inner wall of the sliding groove 10 slides A sliding block 11 is connected, one side of the sliding block 11 is fixed...
Embodiment 2
[0025] see image 3 On the basis of Embodiment 1, a further improvement has been made: the bottom of the detection plate 5 is provided with evenly distributed installation grooves, the inner wall of the installation groove is movably connected with a second spring, and the second spring is fixedly connected with the movable column 6. By setting the first The second spring and the installation groove can make the positioning column 6 shrink into the inside of the installation groove during the movement of the robot, so as to prevent its protrusion from causing the robot to hang in the air. and the thread directions of the two screw mandrels 12 are opposite. When the servo motor 15 rotates, the belt pulley 16 will drive the belt 17 to move, and the belt 17 will drive the pulley 14 to rotate, so that the screw mandrel sleeve 13 will rotate. The threads of the two screw rods 12 are set in reverse, so that when the screw rod sleeve 13 rotates, the two screw rods 12 move relative to...
Embodiment 3
[0028] see image 3 On the basis of Embodiment 1, a further improvement is made: the adjustment device 18 includes a second hinged seat 181, the second hinged seat 181 is fixedly connected with the sliding block 11, and the end of the second hinged seat 181 away from the sliding block 11 is hinged with an air pressure Rod 182, the model of preferred air pressure rod 182 is JL-1015, and the side of air pressure rod 182 far away from the second hinge seat 181 is hinged with the third hinge seat 183, and the third hinge seat 183 is fixedly connected with support plate 19. When the inclination angle of the plate 22 is adjusted, the air pressure rod 182 can be stretched. When the air pressure rod 182 is stretched, the air pressure rod 182 can rotate around the second hinge seat 181, so that the air pressure rod 182 can pull or push the support plate 19 , so that the inclination angle thereof is changed, so that the inclination angle of the detection plate 22 can be changed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More