

Dynamic step length-based target gravity bidirectional RRT path planning method
A technology of dynamic step size and path planning, applied in navigation computing tools and other directions, can solve the problems of reducing the randomness of path search, poor real-time performance, and unreachable targets, and achieve the effect of improving the success rate of path search and enhancing the ability to avoid obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
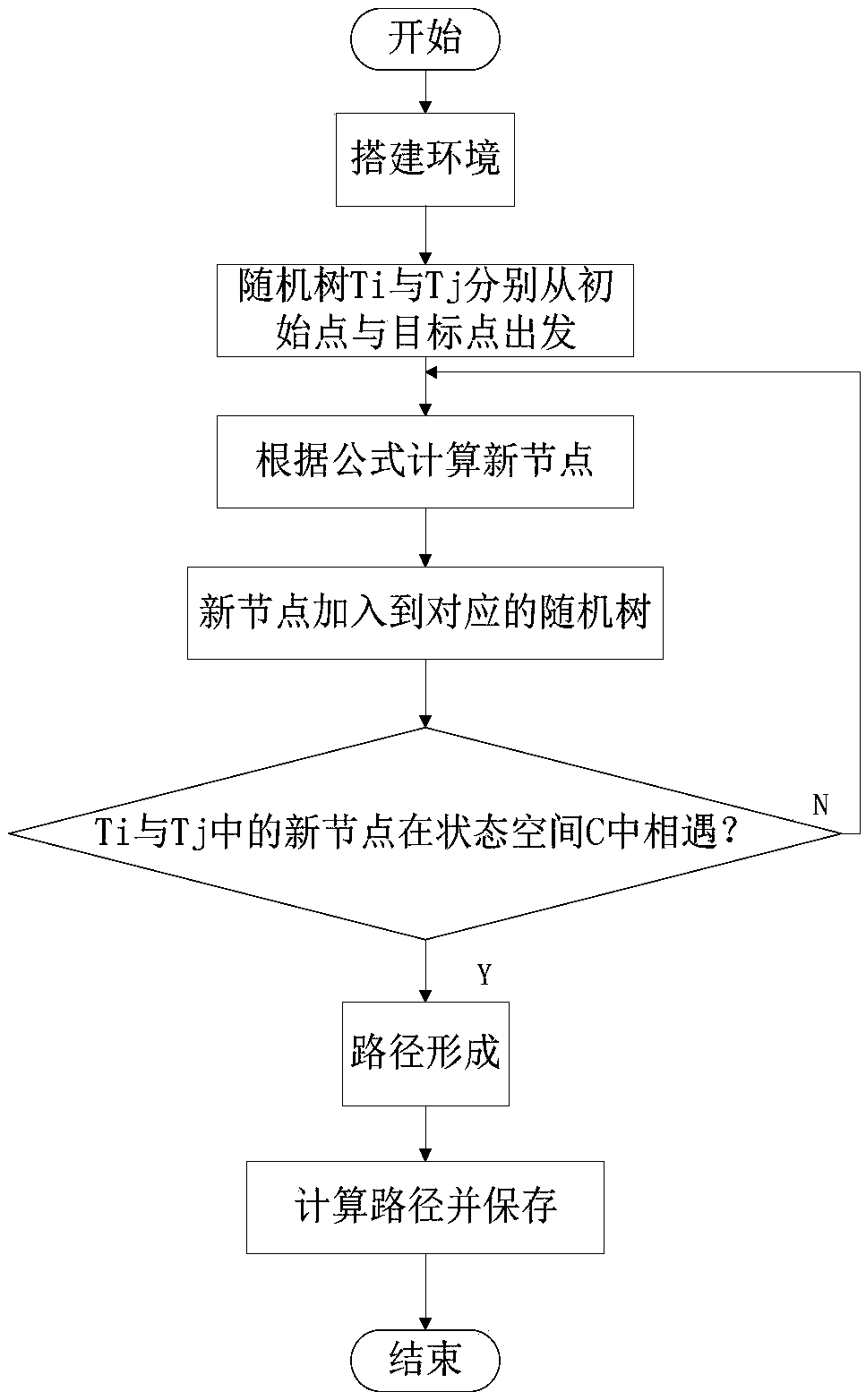
[0025] Embodiment 1: as Figure 1-8 As shown, a dynamic step-based two-way RRT path planning method for target gravity, its main flow chart is as follows figure 1 As shown, the specific steps of the method are as follows:
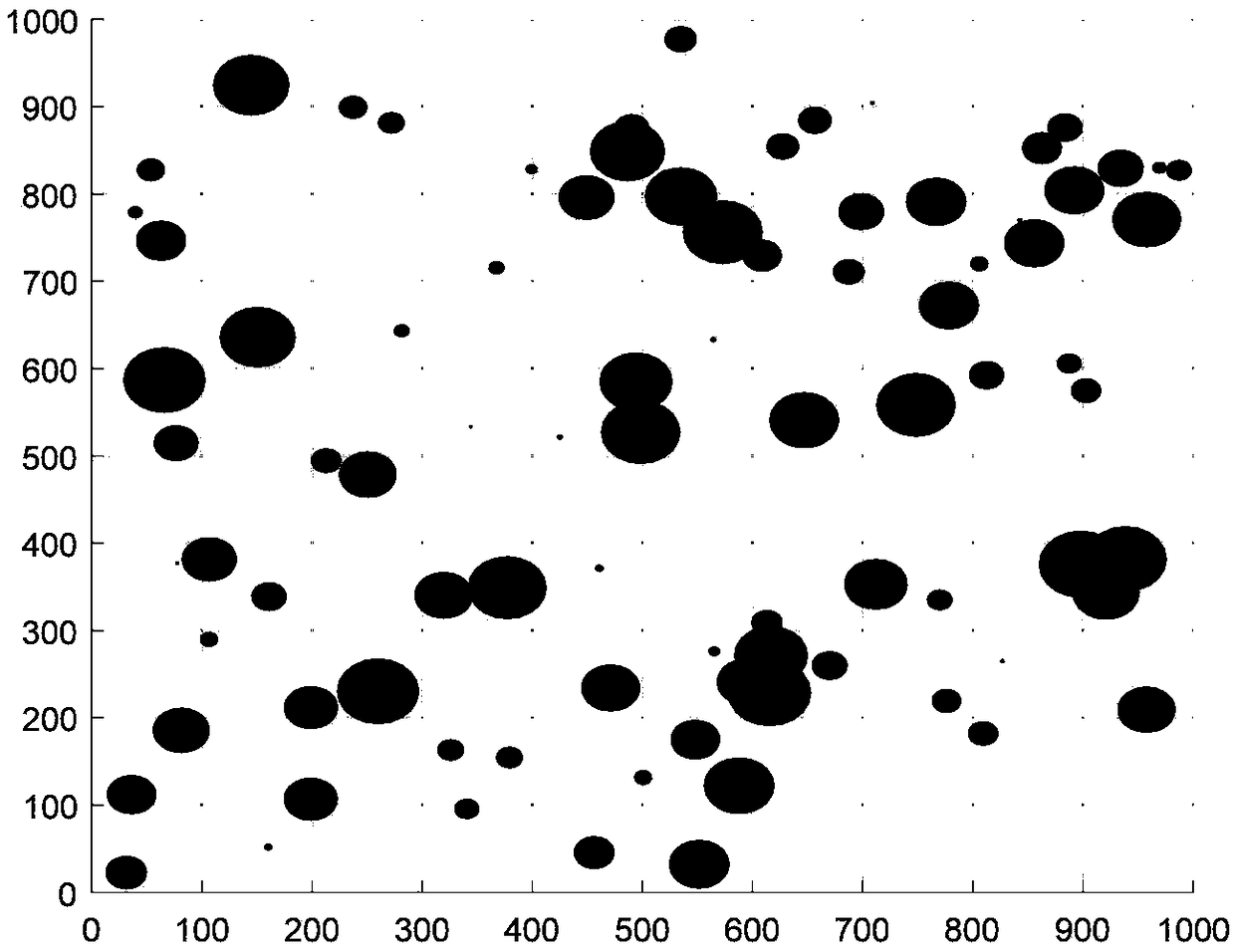
[0026] Step 1. Build the working environment of the intelligent robot and set it in a 1000×1000 environment, such as figure 2 As shown in , the static obstacles are randomly distributed in black irregular shapes, with different sizes;
[0027] Step 2: Determine the initial point Xinit position and the target point Xgoal position of the intelligent robot in the state space C. figure 2 The lower left corner [0,0] is the initial point Xinit of the intelligent robot, and the upper right corner [1000,1000] is the target point Xgoal of the intelligent robot. Among them, the state space C refers to the working environment; the state space C is composed of the free space Xfree and the obstacle space Xobs, the obstacle space Xobs is composed of static obstacles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More