Method of robot safety work control
A technology of safe work and control methods, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that it is difficult to accurately prevent robots from colliding with operators, and achieve the effect of reducing safety accidents and preventing collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
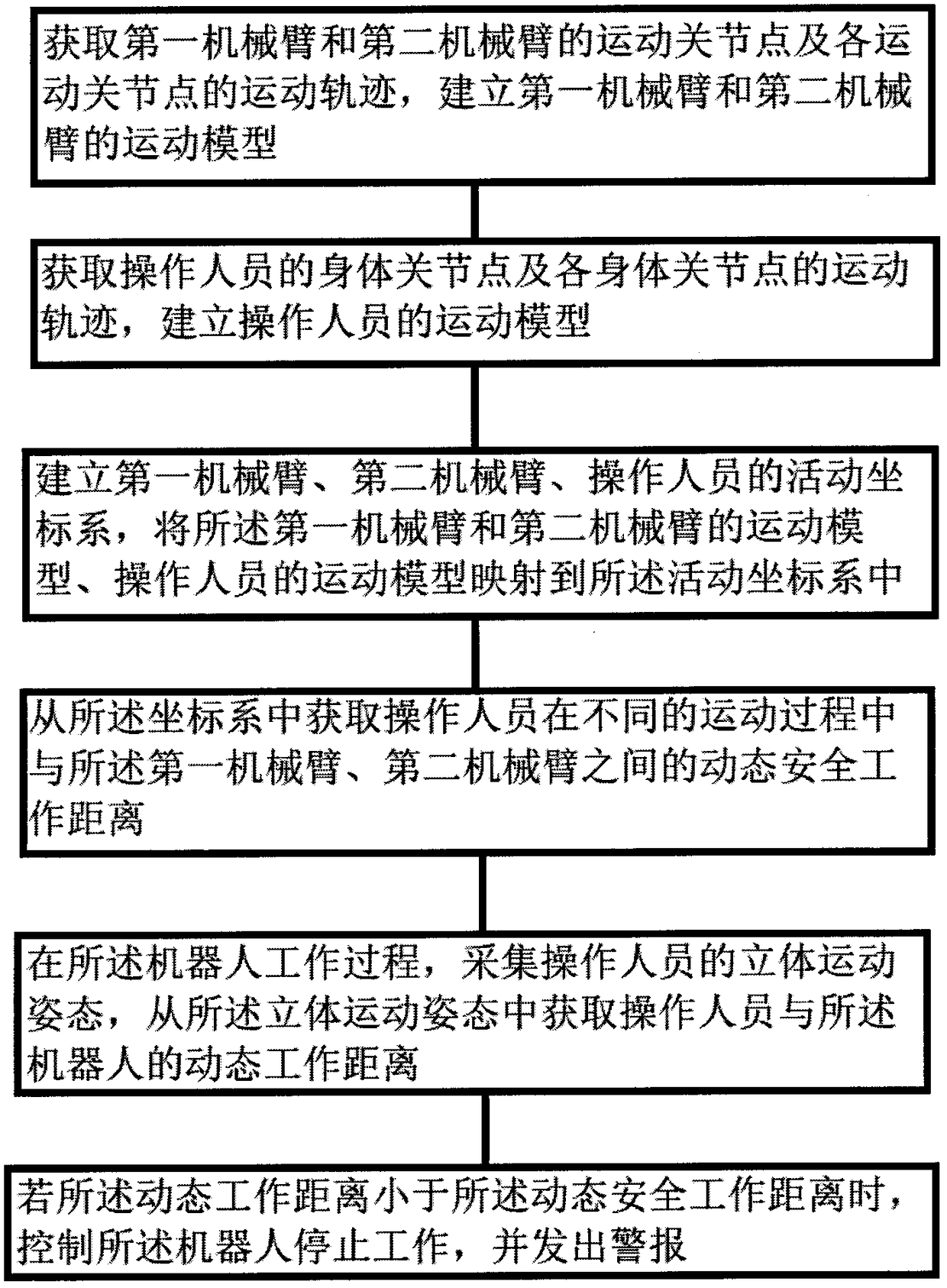
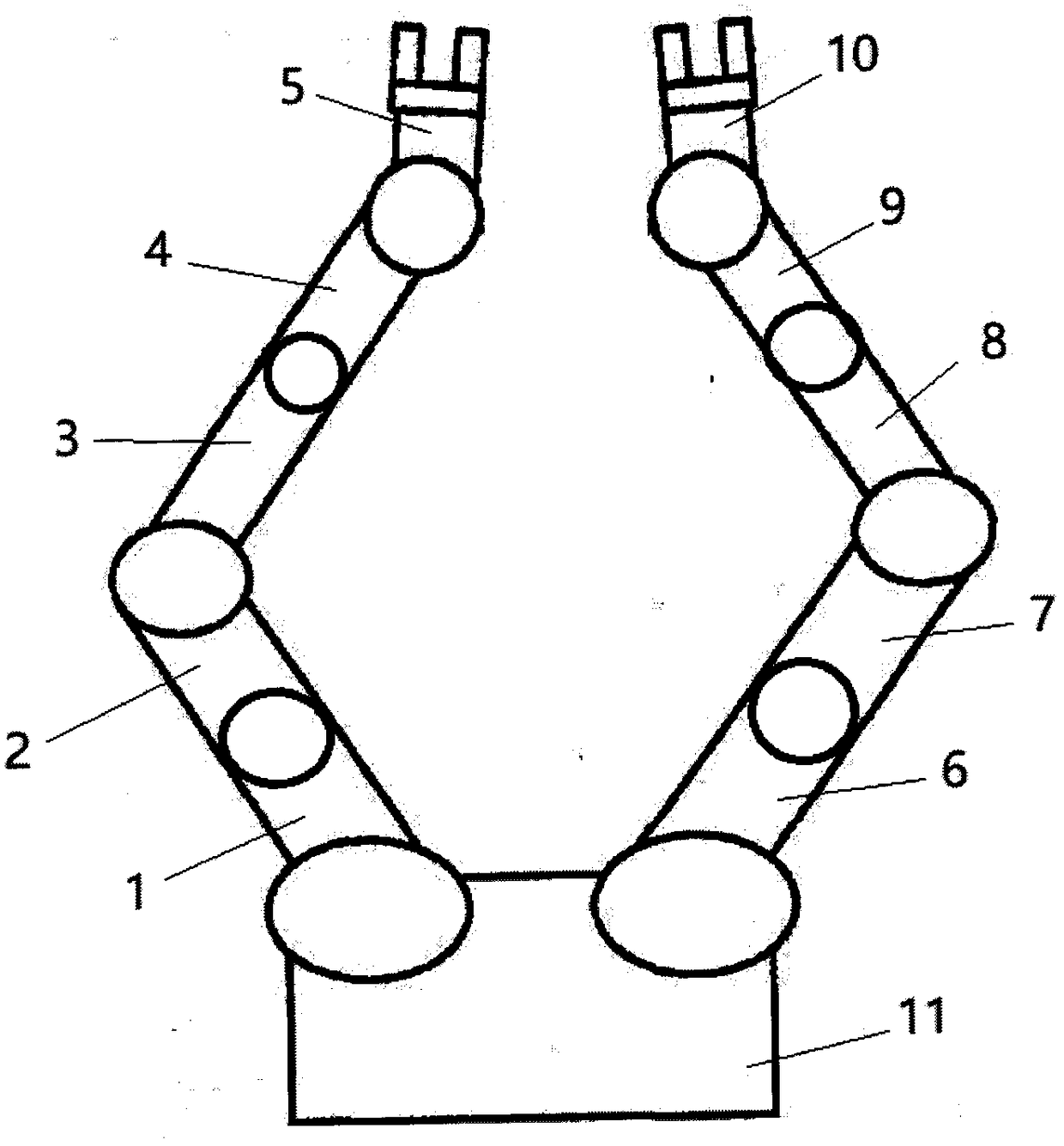
[0031] Please see figure 1 , figure 2 , figure 1 A schematic flow diagram of a robot safety work control method provided by a specific embodiment of the present invention; figure 2 A schematic structural diagram of a robot provided for a specific embodiment of the present invention.
[0032] like figure 1 , figure 2 As shown, the robot safety work control method provided by the present invention, wherein the robot includes a base 11, a first mechanical arm and a second mechanical arm, and the first mechanical arm and the second mechanical arm are rotatably mounted on the base , driven by the servo motor, the first mechanical arm and the second mechanical arm can rotate within a preset angle range.
[0033] The first mechanical arm includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com