Vision-based robot posture adjustment device and method
A pose adjustment and robot technology, applied in the field of robotics, can solve the problems of position uncertainty, deviation, and inability to ensure that the workpiece is relatively consistent when placing workpieces, and achieve the effects of convenient adjustment, convenient static collection, and convenient debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
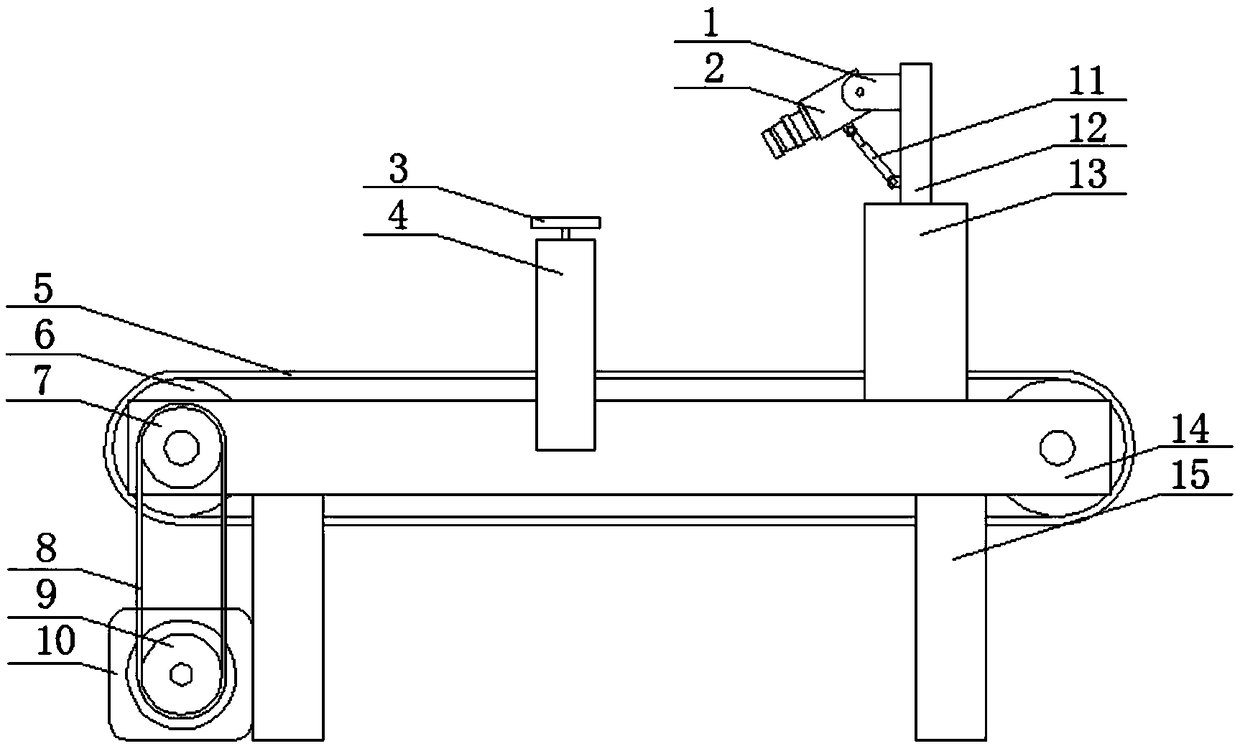
[0030] refer to Figure 1-5 , a vision-based robot pose adjustment device, including two connecting plates 14, two connecting plates 14 are jointly rotated and connected with two transmission shafts 6 parallel to each other, and the lower ends of the two connecting plates 14 are fixed on both sides There are support rods 15 for stable support, and the two transmission shafts 6 are connected by a transmission belt 5. One end of one of the transmission shafts 6 passes through one of the connection plates 14 and extends to one side of the connection plate 14. The transmission shaft 6 One end is fixed with the first rotating wheel 7, the lower end of connecting plate 14 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com