

Panoramic camera attitude estimation method based on depth learning
A panoramic camera and pose estimation technology, which is applied in the field of panoramic camera pose estimation based on deep learning, can solve the problems of difficult to obtain data, difficult to obtain results, weak quaternion semantics, etc., and achieves good robustness and strong semantics. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to better understand the technical solution of the present invention, further detailed description will be given below in conjunction with the accompanying drawings.
[0038] The present invention provides a method for estimating the attitude of a panoramic camera based on deep learning, which combines the popular deep convolution network with the method of estimating the attitude of the camera by using the vanishing point to estimate the rotation matrix of the panoramic camera relative to the world coordinate system.
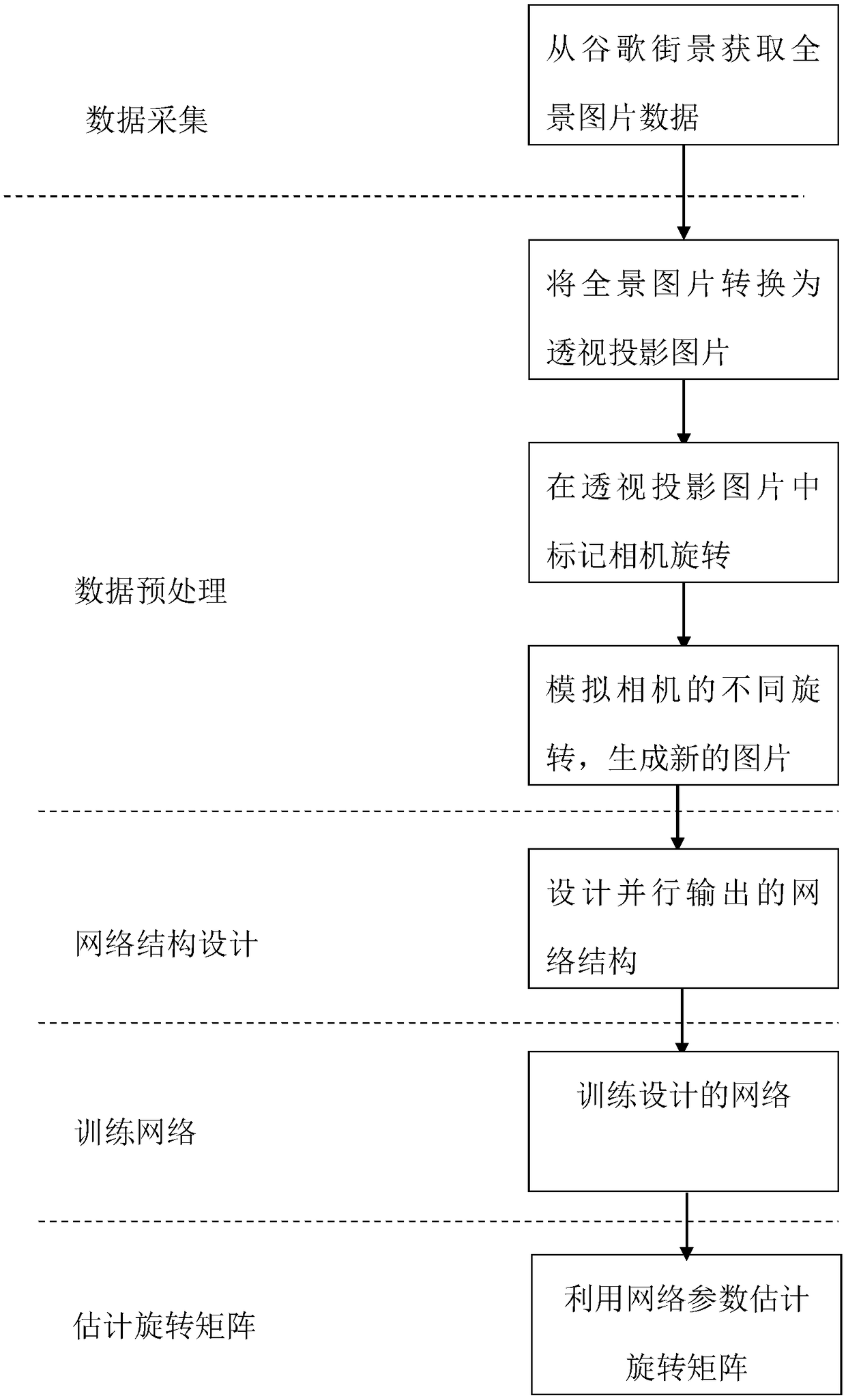
[0039] Using the method provided by the present invention, a picture taken by a panoramic camera is used to estimate the rotation matrix R of the camera relative to the world coordinate system; the estimation method is as follows:
[0040] A. The data collection phase, consisting of one step:
[0041] 1) Write a data collection program to collect panoramic pictures from Google Street View;
[0042] B. Data preprocessing stage, including three s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More