

Automatic positioning method and device for tips of different micro pipettes in automatic microinjection system
A technology of microinjection and automatic positioning, which is applied in the directions of image data processing, instruments, and analysis materials, etc., and can solve problems such as inability to accurately locate the needle tip position of the suction needle, separation of the injection needle from the background, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
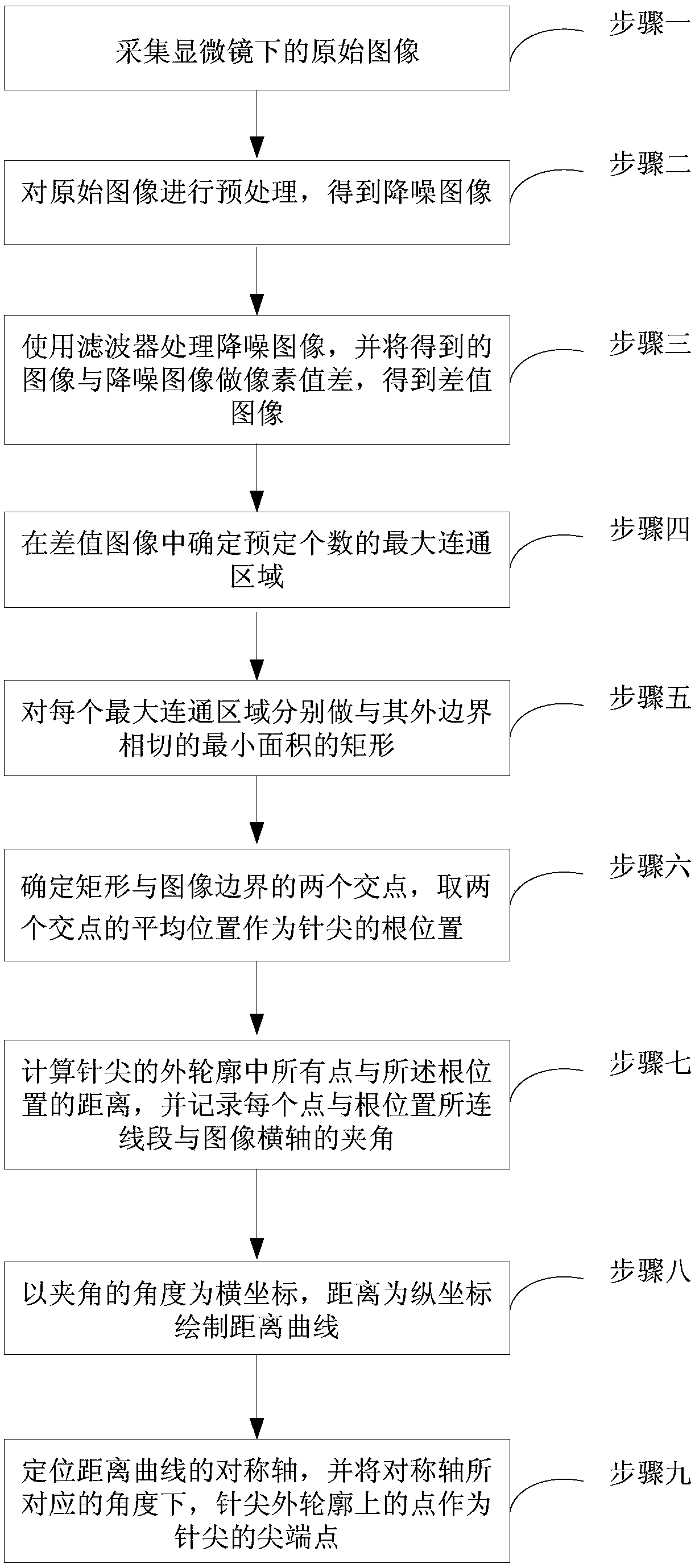
[0032] Embodiment 1: The automatic positioning method of different micropipette tips in the automatic microinjection system of the present embodiment comprises the following steps:
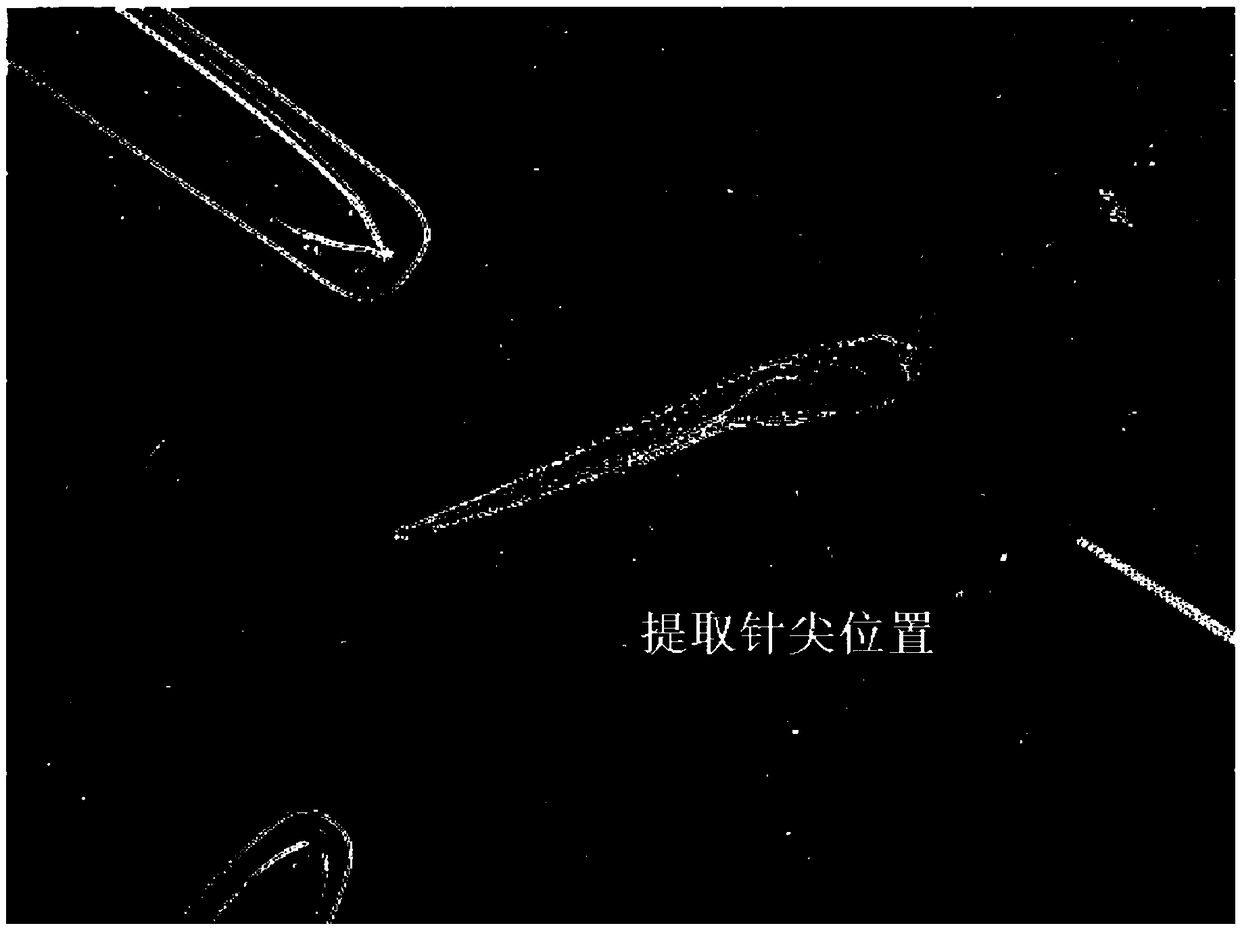
[0033] Step 1. Collect the original image under the microscope. where the original image as figure 2 shown.
[0034] Step 2. Preprocessing the original image to obtain a noise-reduced image.
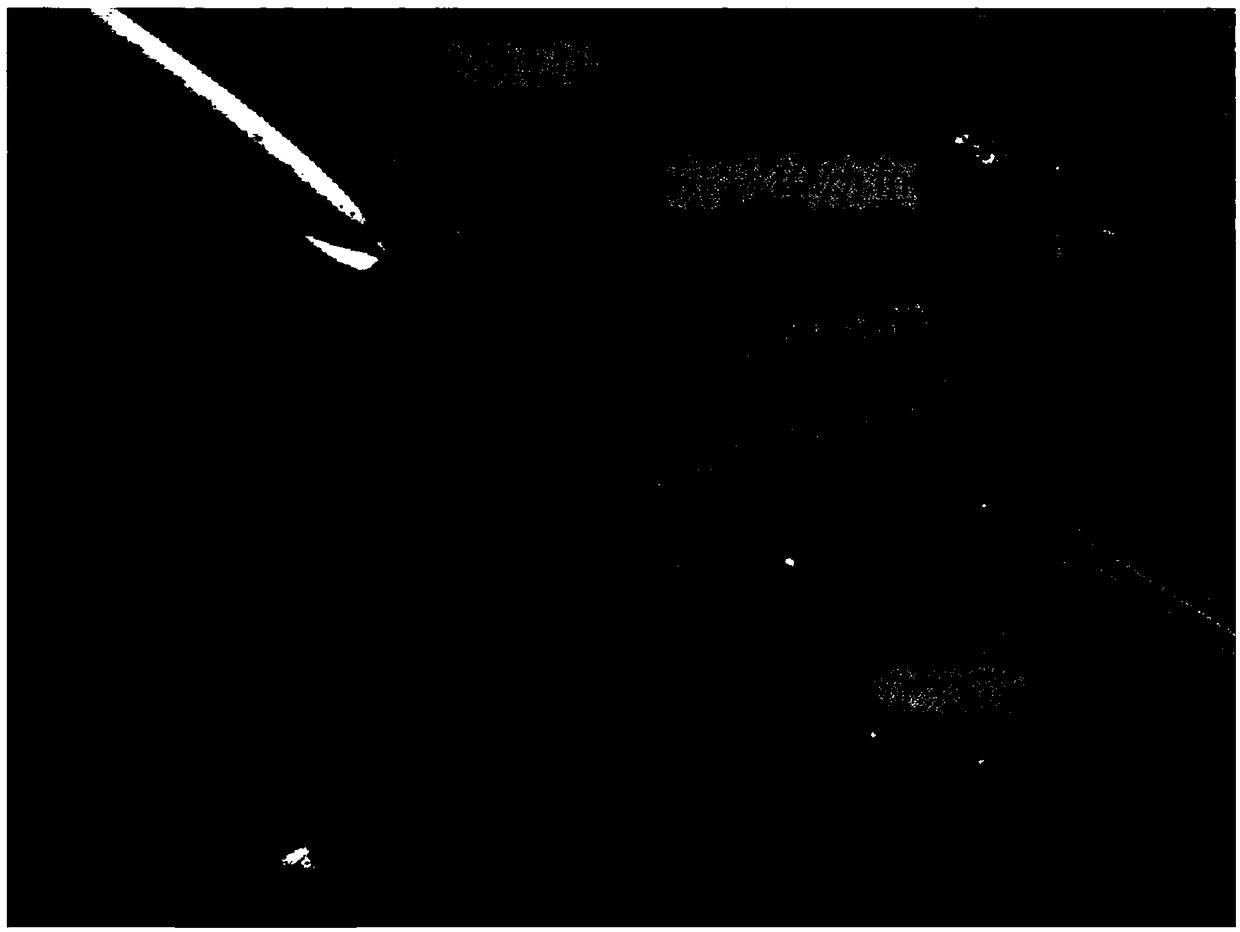
[0035] Step 3: Process the noise-reduced image with a filter, and perform pixel value difference between the obtained image and the noise-reduced image to obtain a difference image. The purpose of this step is to deepen the part of the needle tip with strong directionality, so that the background part does not change significantly, and then the approximate position of the needle tip can be obtained, such as image 3 shown.
[0036] Step 4. Determine a predetermined number of maximum connected regions in the difference image; each of the maximum connected regions is used to characterize the region where ...
specific Embodiment approach 2
[0043] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: in step two, the preprocessing includes:
[0044] Step 2.1, reduce noise in the image through a low-pass Gaussian filter.
[0045] Step 2.2, using global binarization to remove noise caused by impurities in the petri dish in the field of view of the microscope.
[0046] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0047] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is:
[0048] In step 3, the filter is a Gabor filter. The Gabor filter can amplify the direction information, which is more in line with the requirements of the present invention.
[0049] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More