

Navigation control method and system based on distance calculation
A control system and control method technology, applied in control/adjustment system, two-dimensional position/channel control, non-electric variable control, etc., can solve the problems of transportation not being delivered to the designated place in time, large driving error of GPS navigation, etc. Achieve the effect of small deviation, high accuracy and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
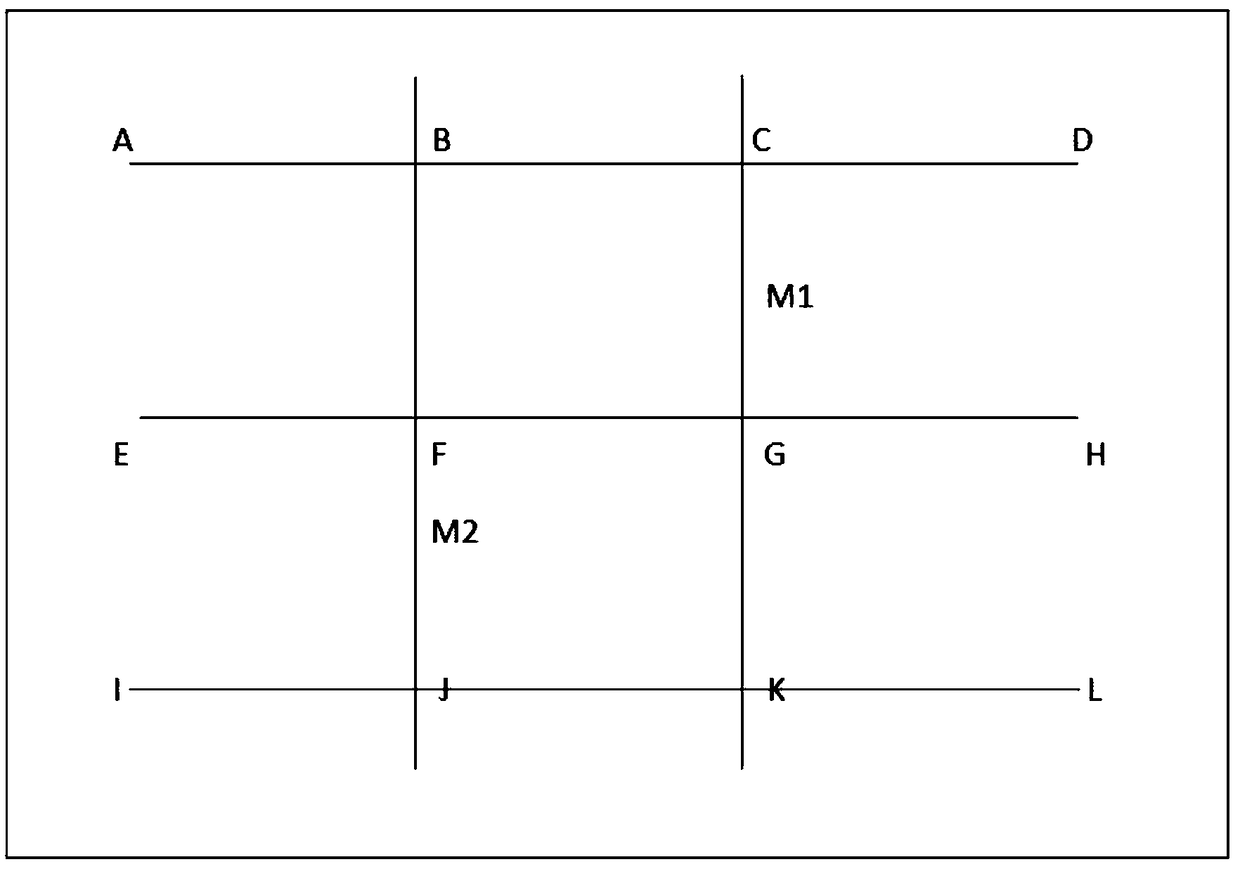
[0028] Such as Figure 1-2 As shown, the logistics road of the factory is as shown in the figure below (the distance between A-B and B-F is 10 meters, the lateral speed is 1 m / s, the vertical speed is 2 m / s, and the corners are 90°C)
[0029] If it is necessary to transport items from A to L, a route database is established, and the distance between the starting point and the end point of the route, the direction of the unmanned vehicle, and the corner of the road are input and stored in the storage module of the controller; To select the best route (such as the shortest route) in the storage module, you can choose route 1: A-B-C-G-K-L; route 2: A-B-F-J-K-L, route 3: A-B - One of F-G-K-L.
[0030] Positioning principle: If you choose route 1, the distance is a function of speed and time. When the driverless car travels 25 meters, the driverless car is located at the midpoint M1 of C-G; if you choose route 2, the driverless car travels 25 meters At this time, the unmanned veh...
Embodiment 2
[0035] The present invention can also be used in a home environment, for indoor delivery of meals, delivery of items and even cleaning; firstly establish a route database, for example, route S1 from the living room to the kitchen, route S2 from the living room to the balcony, route S3 from the living room to the bedroom, and route S3 from the living room to the kitchen. Route S4 is the route from the bedroom, route S5 is the route from the living room to the bathroom, and S6 is the route from the kitchen to the balcony. Input and store in the storage module of the controller and store in the storage module of the controller, and there is a two-dimensional code for calibration at the designated position on each route; when in use, if the elderly at home are inconvenient to walk, the meals in the kitchen will be sent to the It is necessary to walk back and forth many times to the dining table in the living room. At this time, you can put the meals on the driverless car, choose th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More