

Foldable and bendable space truss capturing device
A space truss and bending technology, which is applied in the direction of program-controlled manipulators, manufacturing tools, chucks, etc., can solve the problems of small bending space of the mechanism, inability to adapt to the shape of the object, and the offset of the grasping surface, etc., to achieve small size and convenient transportation process , good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
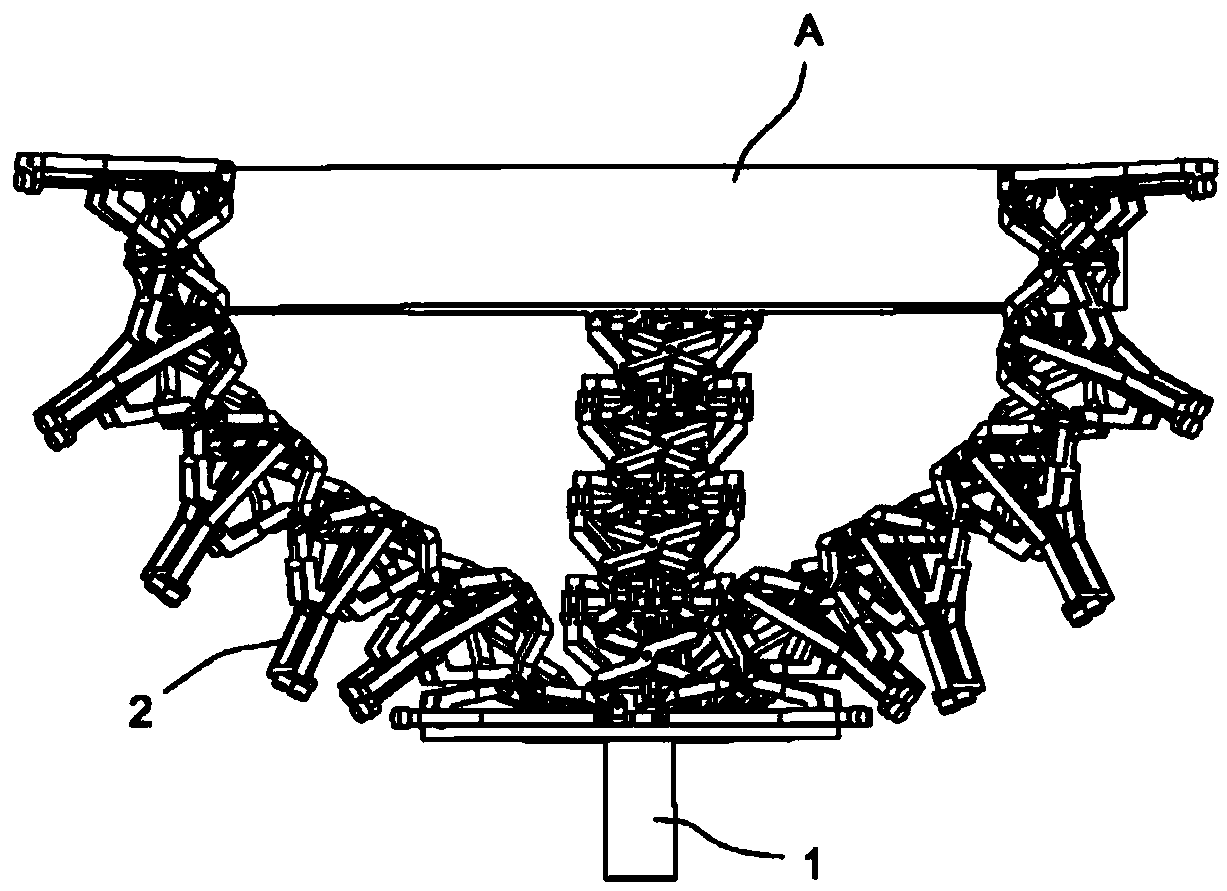
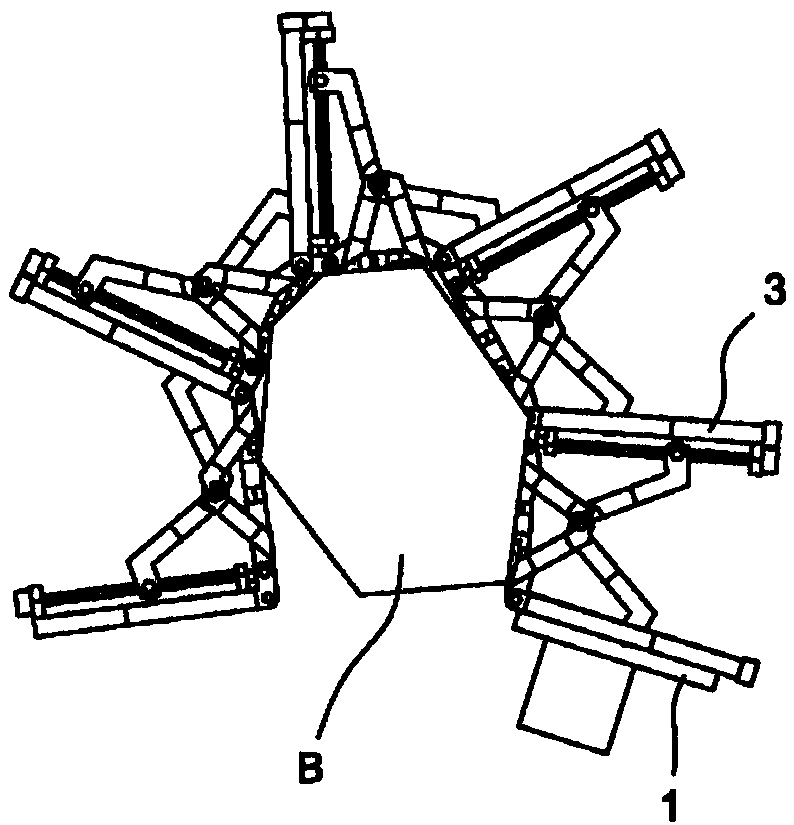
[0046] This embodiment provides a space truss capture device, comprising a base 1 and three identical capture robot claws 2, wherein the three capture robot claws 2 can work together, as figure 1 As shown, for example, for a larger non-cooperative target A, three catching manipulator claws 2 are respectively deployed to appropriate positions, and the capture of a larger non-cooperative target A is completed cooperatively. Preferably, the three catching manipulator claws 2 are in the form of The circular array is distributed on the base 1; it is also possible to use only one grasping robot claw 2 to work alone, such as figure 2 As shown, for example, for a small non-cooperative target B, after the single capture robot claw 2 is unfolded and bent, it wraps the small non-cooperative target B to complete the capture process.
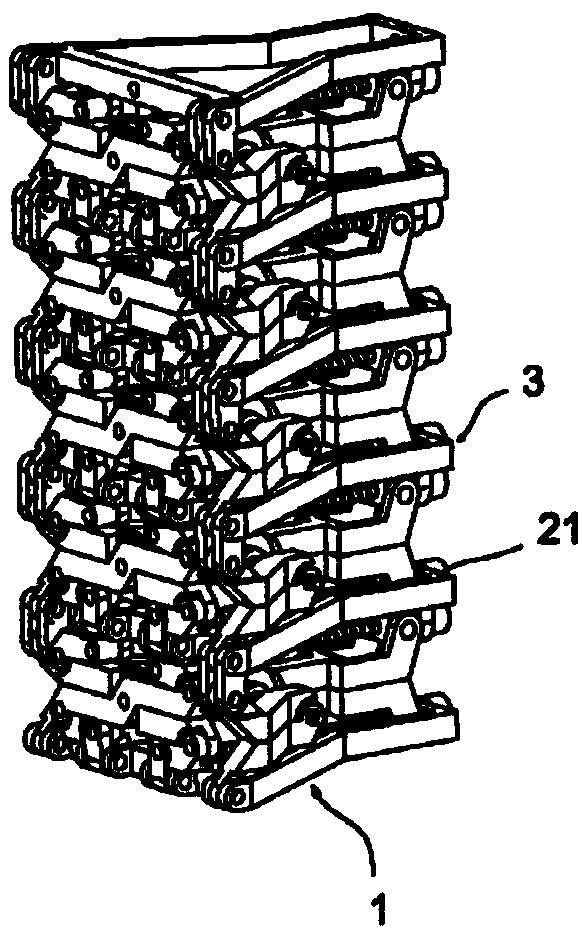
[0047] The grasping robot claw 2 includes several sequentially connected folding and bending units 3. Preferably, this embodiment shows a grasping robot cl...
Embodiment 2
[0061] The difference between this embodiment and Embodiment 1 lies in the difference in the folding drive unit. This embodiment provides a folding drive unit 8 that uses a new type of artificial muscle material as the folding and bending unit 3. In the same folding and bending unit 3, The folding driving unit 8 is used as the driving of the upper supporting frame 31, and is mainly used for the unfolding process of the folding and bending unit 3; Figure 9 As shown, it specifically includes a driving member 81, a slide rail (optical axis) 82, and a spring 83 arranged on the slide rail 82, wherein the driving member 81 is arranged to directly act on the catch mechanism 4, so that the catch mechanism 4 acts, thereby Drive the position of the upper support frame 31 to change to complete the process of folding or unfolding.
[0062] See you again Figure 9, in order to improve the overall rigidity of the structure, in a folding and bending unit 3, the upper support frame 31 is pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More