

Fixed-point landing method for unmanned aerial vehicle
A UAV and algorithm technology, applied in the field of aircraft, can solve the problem that the UAV system cannot achieve high-precision and high-reliability fixed-point landing, achieve the effect of efficient fixed-point identification and landing, and ensure reliability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Referring to the accompanying drawings, the present invention will be further described in detail with specific embodiments.
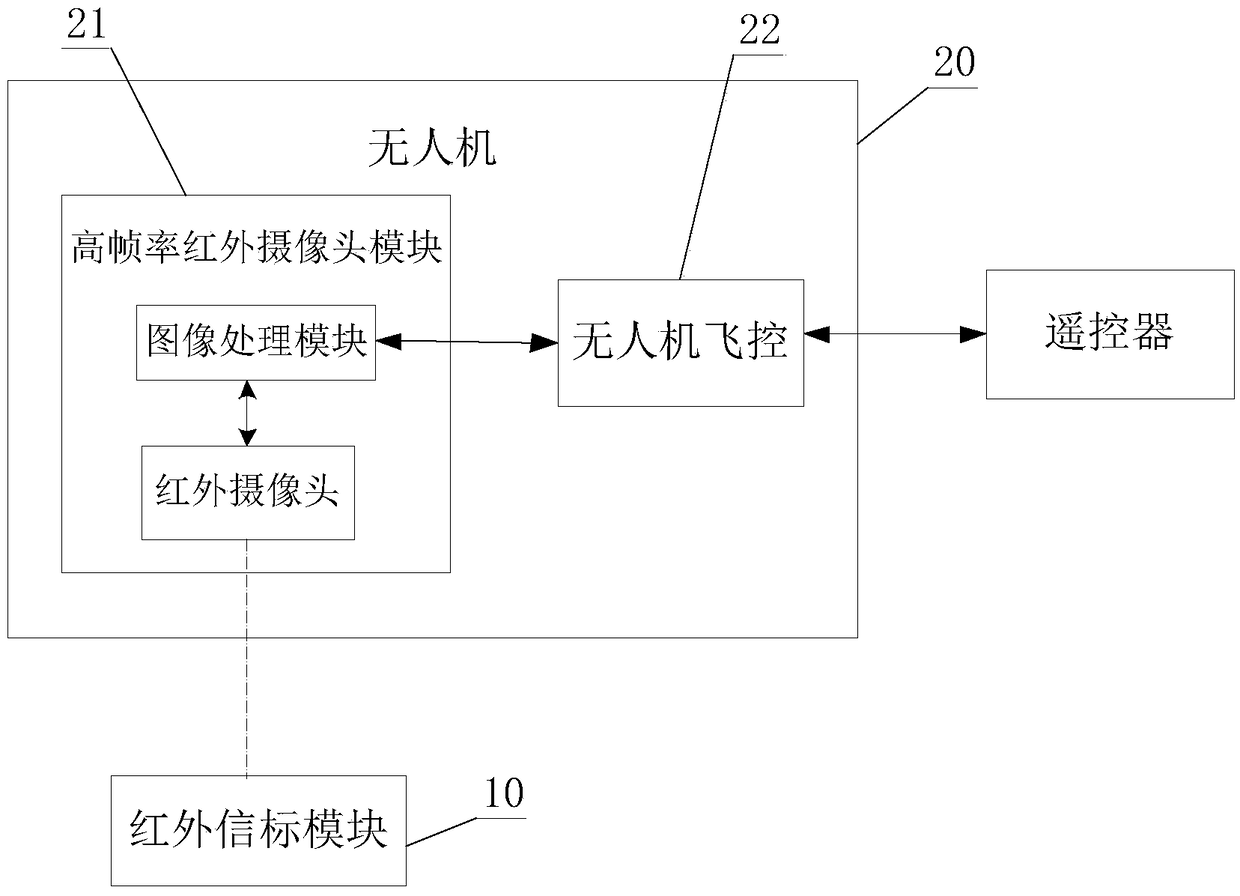
[0024] Such as figure 1 As shown, the UAV fixed-point landing control system includes an infrared beacon module 10 and a UAV 20, and the UAV 20 includes a high frame rate infrared camera module 21 and a UAV flight control 22, and the high frame rate infrared camera module 21 is designed There are image processing modules and infrared cameras. The UAV flight controller 22 is connected and communicated with the high frame rate infrared camera module 21. The drone flight controller 22 is provided with a GPS navigation system.
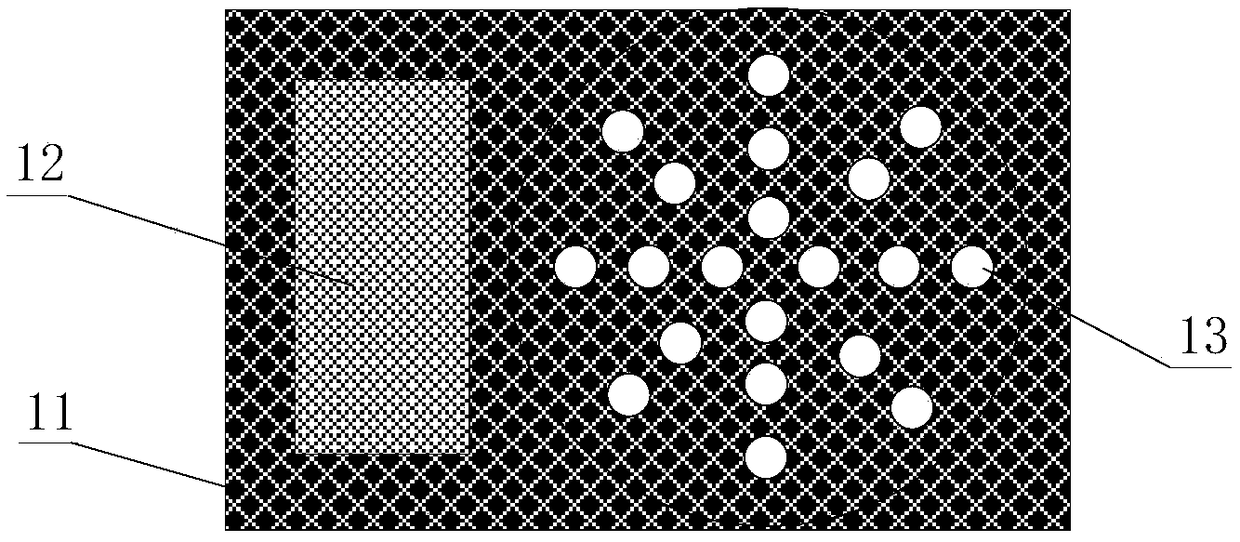
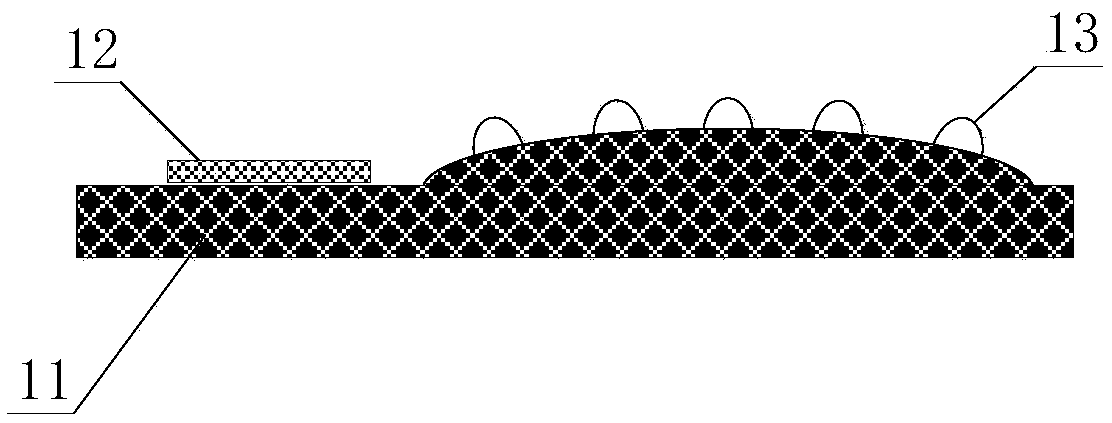
[0025] Such as figure 2 with 3 As shown, the infrared beacon module 10 includes a base 11, the base 11 is provided with an MCU control unit 12 and a drive circuit, the drive circuit is connected with the MCU control unit 12, and a plurality of infrared emitting diodes 13 distributed on the base 11 are connected to the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More