Road scene characterization system based on fusion of laser, camera, GPS and inertial navigation, and method thereof
An inertial navigation system and camera technology, which is used in surveying, mapping and navigation, radio wave measurement systems, satellite radio beacon positioning systems, etc. Achieve the effect of high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
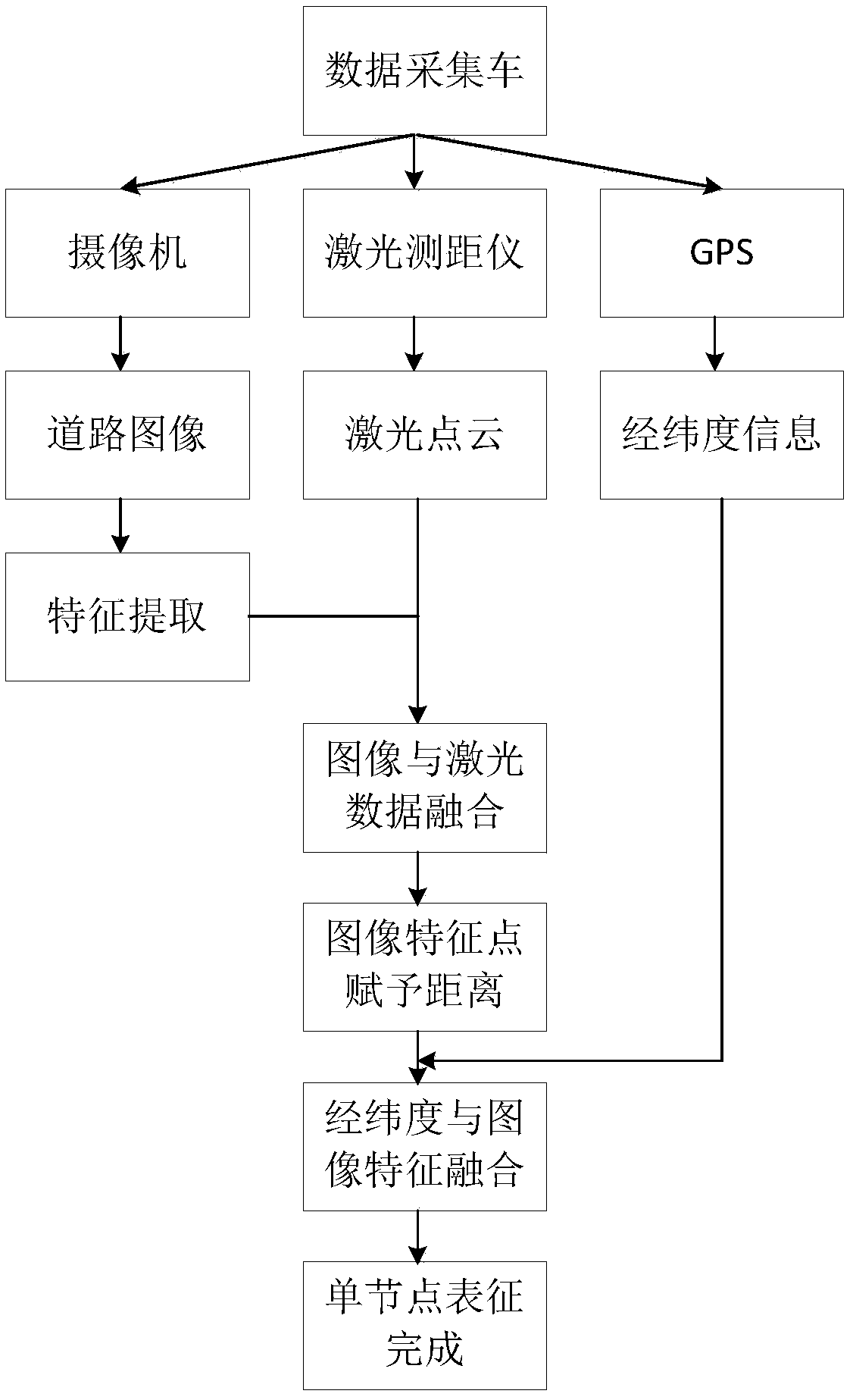
[0066] In this embodiment, through the realization method of the road scene representation system based on the fusion of laser, camera, GPS and inertial navigation, the road scene representation model is established. First, it is a single node representation model. The information is fused, and then the positional relationship between the camera and the laser is solved as follows:
[0067]
[0068] The unit of t is mm, K and R have no unit.
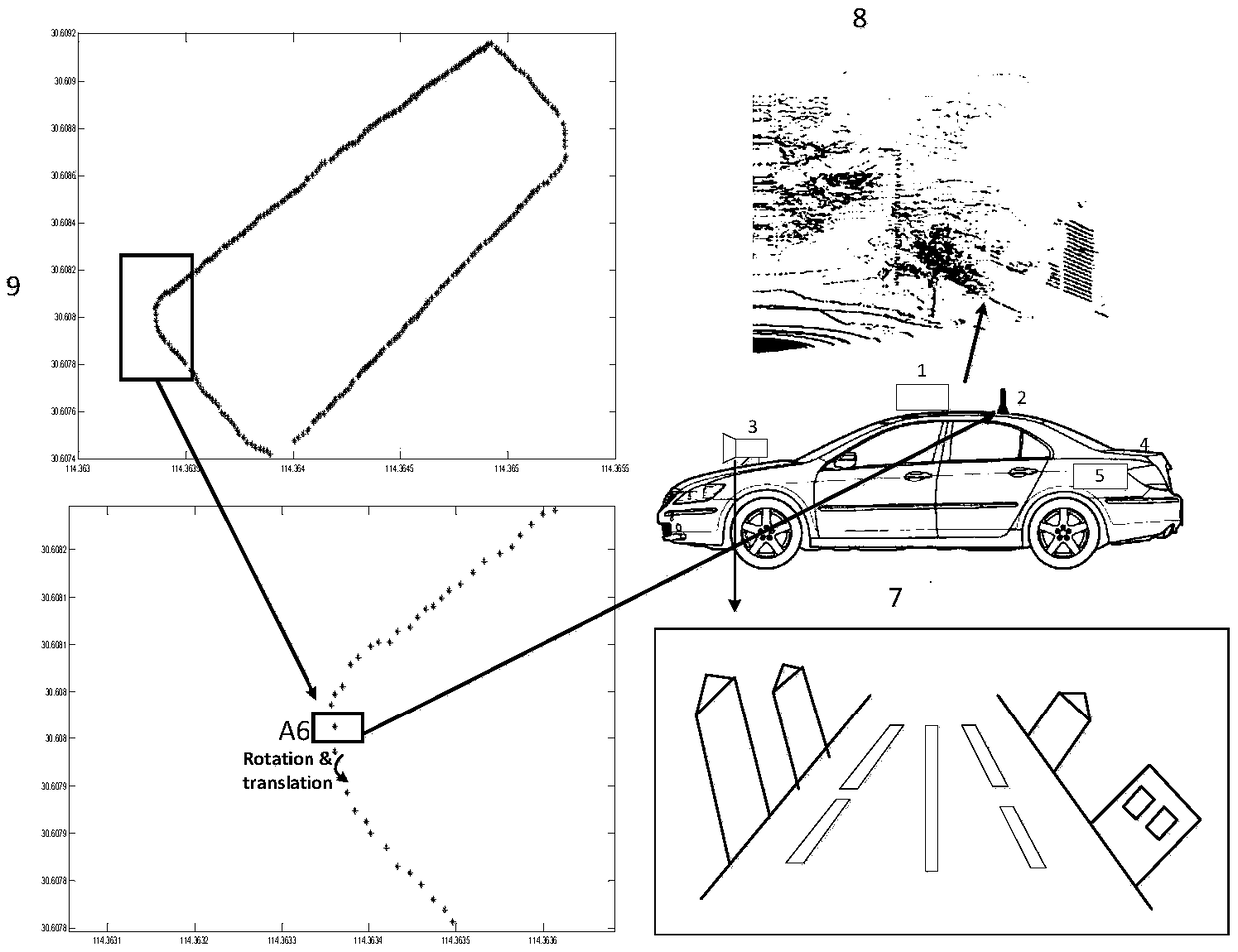
[0069] By fusing image features, laser points and position information, the positional relationship between image, laser point and high-precision position information is obtained as
[0070]
[0071] where the unit of △ is mm, There are no units.
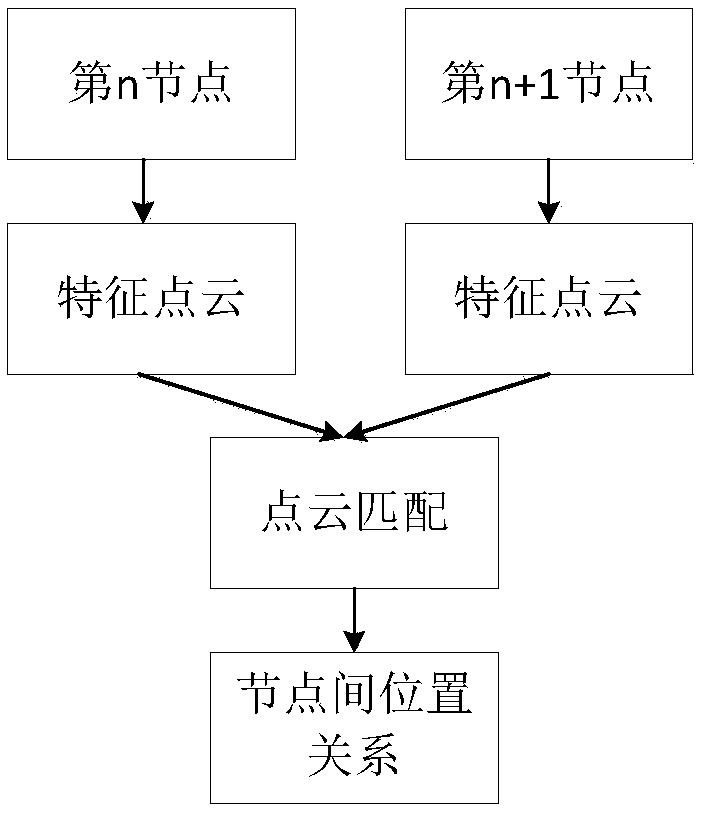
[0072] Secondly, a multi-node representation model is established, and through (2.2.2), the solution is:
[0073]
[0074] Among them, K is the internal parameter obtained in (2.1.2), R' has no unit, and the unit of t' is mm.
[0075] As can be seen from the foregoing embodiments,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More