

Robot positioning and mapping method, computer device and computer readable storage medium
A robot positioning and frame image technology, applied in the field of image processing, can solve problems such as low precision, inability to run in real time, complex calculation and high precision, and achieve high running speed, high-precision positioning, and accurate judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032]The robot positioning and mapping method of the present invention is applied to a robot. Specifically, the robot is a mobile robot, such as a drone, a sweeping robot, etc., and the robot is provided with an embedded chip. The robot positioning and construction method of the present invention The graph method is implemented by the program running on the embedded chip. Further, the embedded chip may have a processor and a memory, and a computer program is stored in the memory, and the processor implements the robot positioning and mapping method by executing the computer program.
[0033] Embodiment of robot positioning and mapping method:
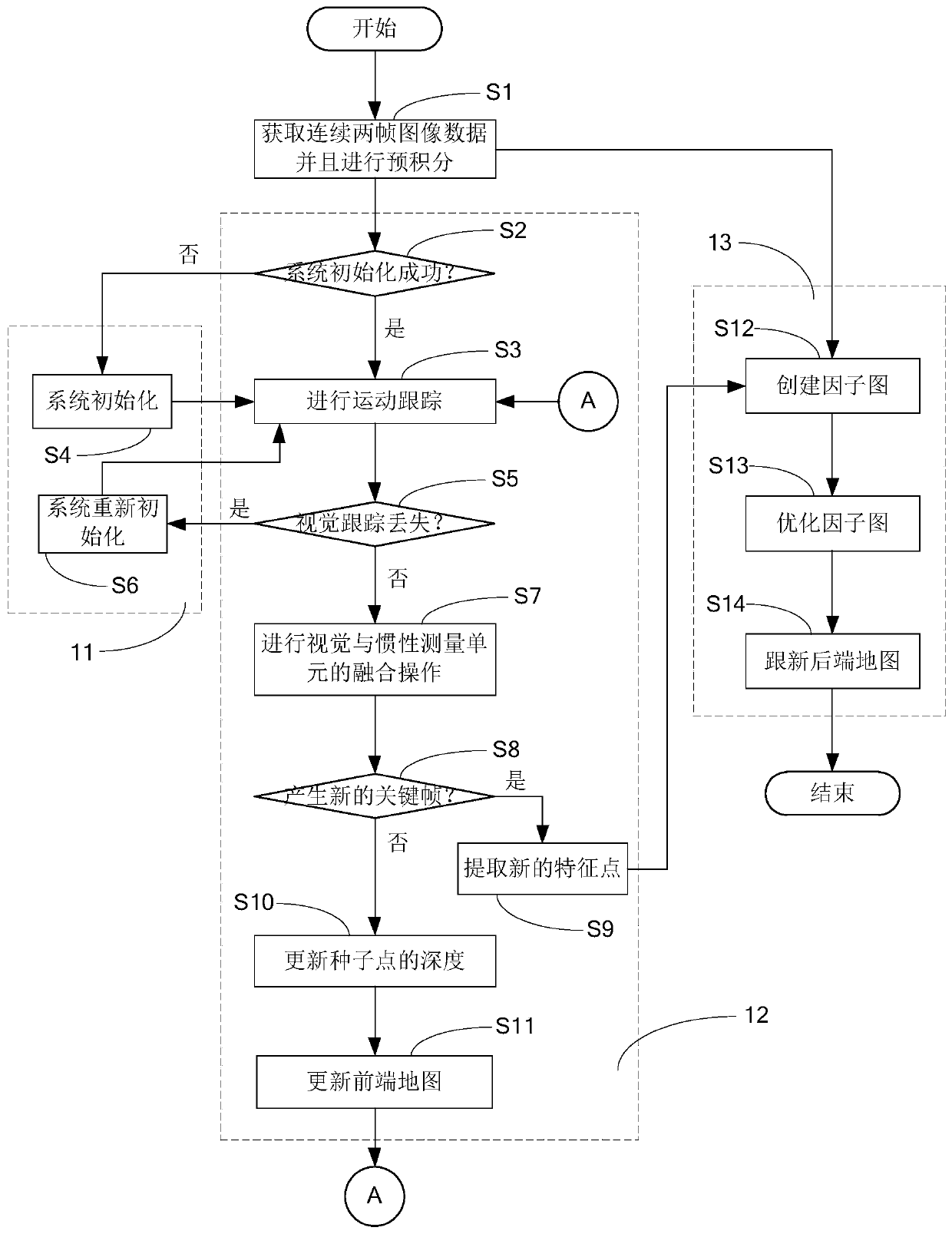
[0034] This embodiment is aimed at the Simultaneous Localization and Mapping (SLAM) algorithm in the visual field. Since visual SLAM algorithms can be divided into sparse indirect algorithms based on feature points, sparse direct algorithms based on photometric error minimization, dense indirect algorithms based on optical flow field ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More