

Automatic mechanical clamp device and clamping method
A technology of mechanical clips and driving mechanisms, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of uncontrollable clamping force, damage, surface damage of the clamped objects, etc., and achieve stable clamping force , simple controls and easy-to-operate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
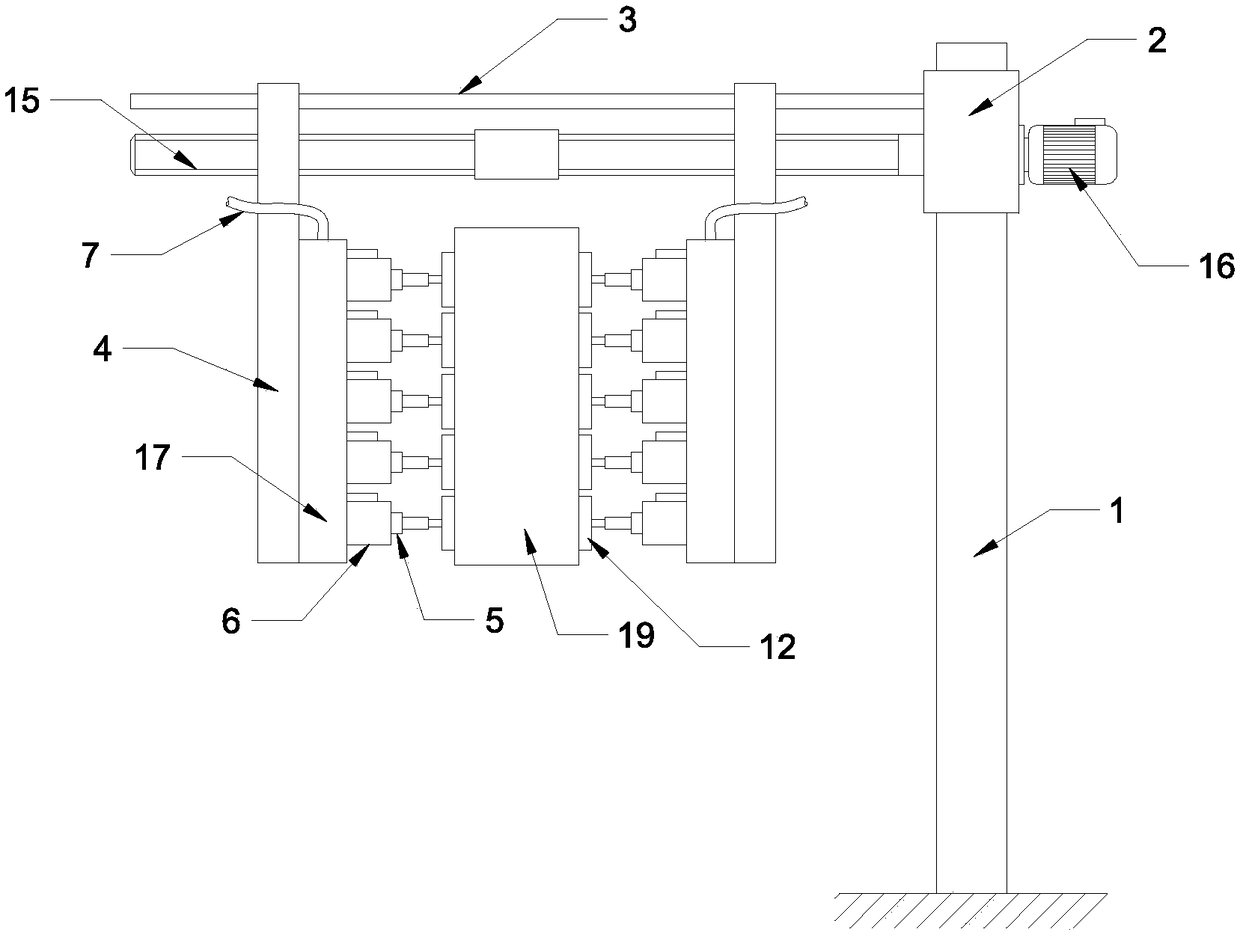
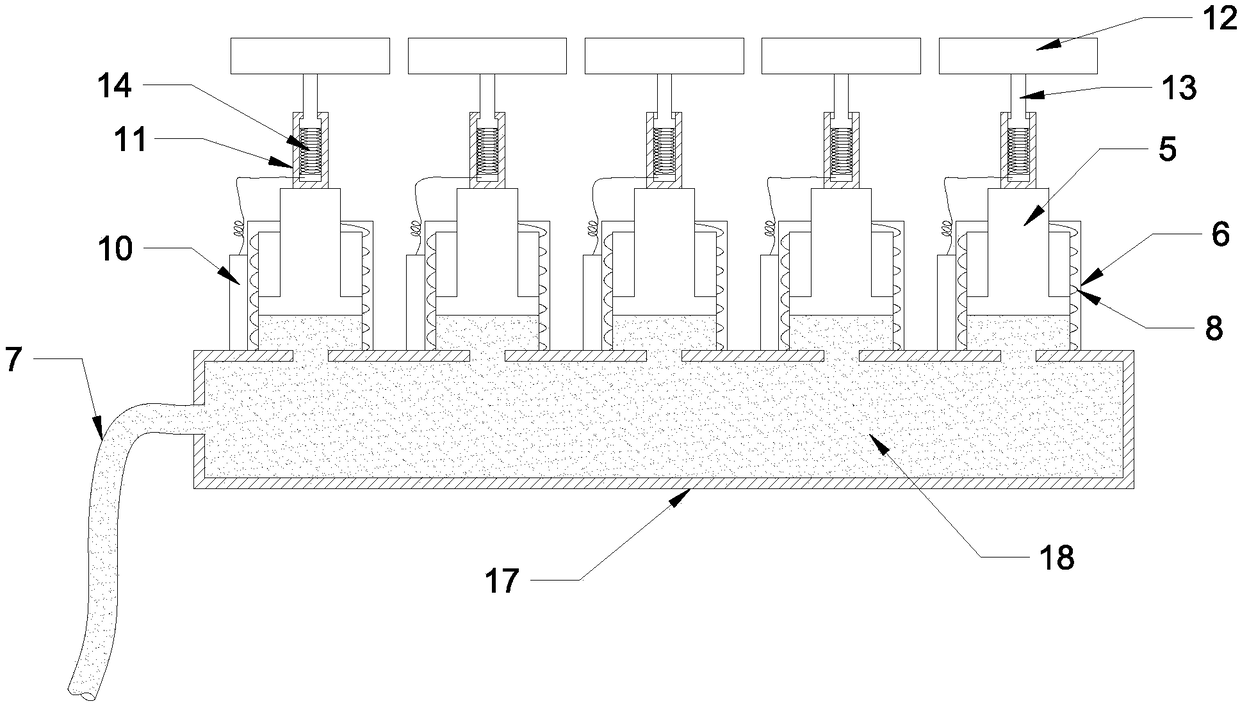
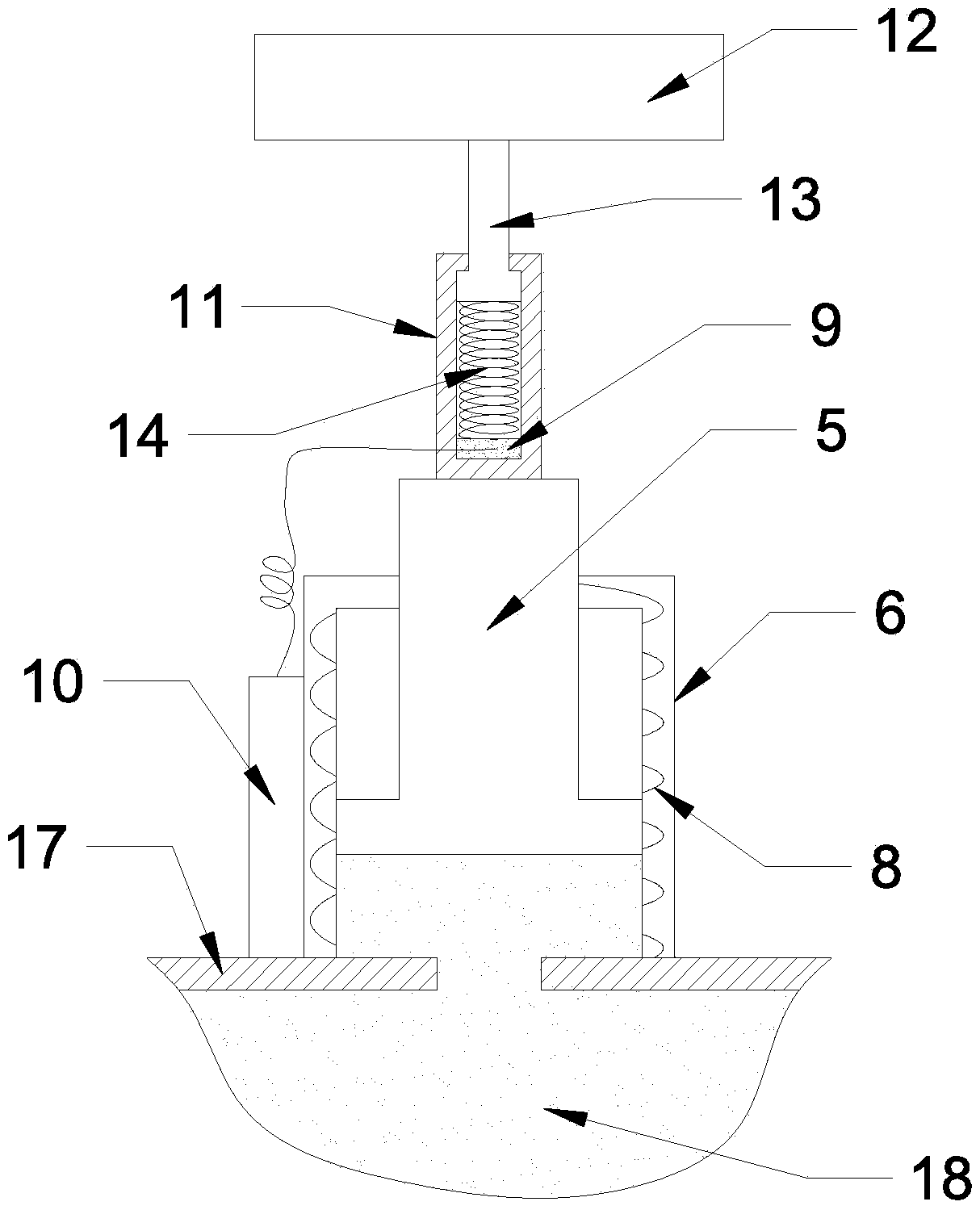
[0024] See Figure 1-3 , An automated mechanical fixture device, including a vertical support rod 1, on which is installed a slider 2 that can rotate and move up and down along the central axis of the support rod 1, and a horizontal guide rod 3 is fixed on the slider 2, The guide rod 3 is equipped with two clips 4 that can slide on the guide rod 3, and the two clips 4 are respectively provided with a driving mechanism that can make the clip 4 slide or stop on the guide rod 3; two clips 4 are respectively provided with a clamping force adjustment mechanism, the clamping force adjustment mechanism includes a plurality of hydraulic cylinders 6 with pistons 5, the hydraulic cylinders 6 are connected to a hydraulic pump through a pipe 7, and the hydraulic cylinders 6 on the two clamps 4 Pistons 5 are arranged oppositely; a conductive coil 8 is wound on the cylinder wall of the hydraulic cylinder 6, a pressure sensor 9 is provided on the free end of the piston 5 along the axis of the...
Embodiment 2
[0030] See Figure 1-3 , A clamping method of an automated mechanical clamp device, the operation steps are:
[0031] S1: According to the material and weight of the clip 19, use the formula pressure threshold to calculate the formula F=mg / f 0 Calculate the pressure threshold to be set;
[0032] S2: Adjust the height of the slider 2 on the support rod 1 and rotate the angle of the guide rod 3 so that the gripping object 19 is located between the two clips 4;
[0033] S3: Start the motor 16 to rotate the bidirectional screw 15 to adjust the relative position of the two clamps 4 on the guide rod 3 so that the free end of the piston 5 contacts the surface of the clamp 19, and the rotation of the motor 16 is stopped;
[0034] S4: Start the hydraulic pump to move the pistons 5 on both sides toward each other, and apply clamping force to the clamped object 19. When any pressure sensor 9 reaches the calculated F value, the relay control board 10 automatically connects to the circuit of the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More