

A flexible waist structure suitable for biped robot and its design method
A biped robot and flexible waist technology, applied in the field of robotics, can solve the problems of large moment of inertia, affecting the stability of the robot, and easy shocks when starting and stopping, so as to reduce impact, improve practicability and durability, and reduce bearing moment Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to facilitate those skilled in the art to better understand the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments,
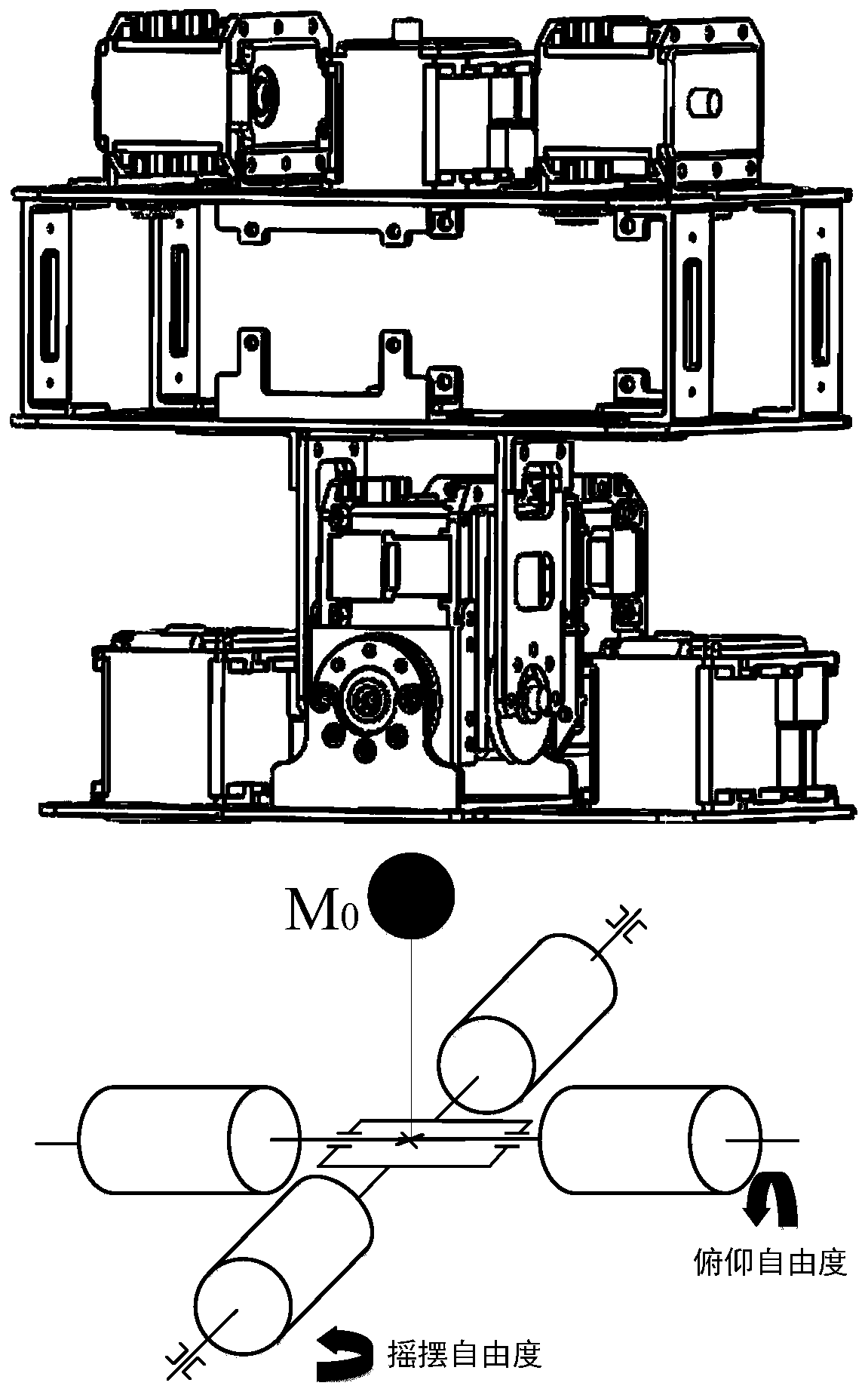
[0047] like figure 1 As shown, a two-degree-of-freedom rigid waist model is established first. Generally speaking, the function of the waist of a biped robot is auxiliary movement, with two degrees of freedom of pitch and swing. The rigid waist is the basis for the flexible waist model.
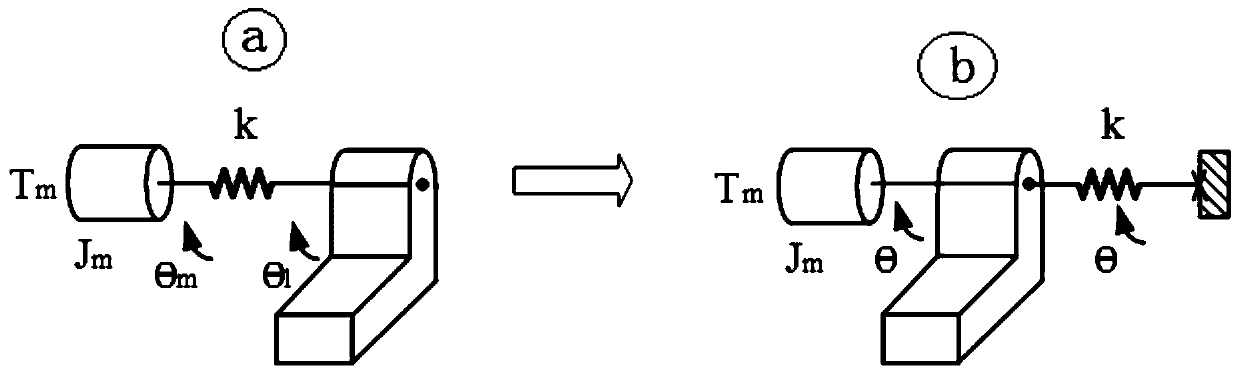
[0048] like figure 2 As shown, in order to improve the mechanical characteristics of the steering gear and the output of the compliant speed, it is considered to introduce the elastic serial drive (SEA) into the two degrees of freedom of the waist. The traditional elastic serial drive is to achieve precise torque control in the robot, and an elastic element is added between the driving mechanism and the driven structure. But the accuracy and real-time per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More