

Docking method of automatic guided vehicle (AGV) docking platform
A technology for docking platforms and load-bearing platforms, applied in conveyors, mechanical conveyors, transportation and packaging, etc., can solve the problems of restricting the promotion and application of industrial automated distribution systems, non-parallel docking equipment, and increased production costs, and achieve a simple docking method. , The effect of reducing the waste rate and improving the machining accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Below according to accompanying drawing, further illustrate technical scheme of the present invention:
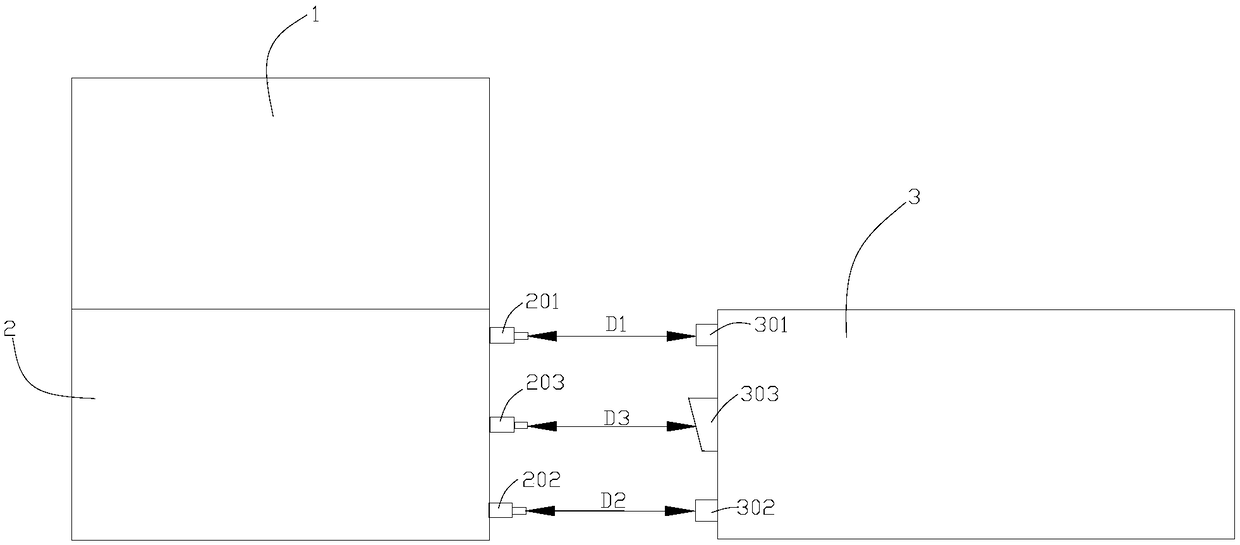
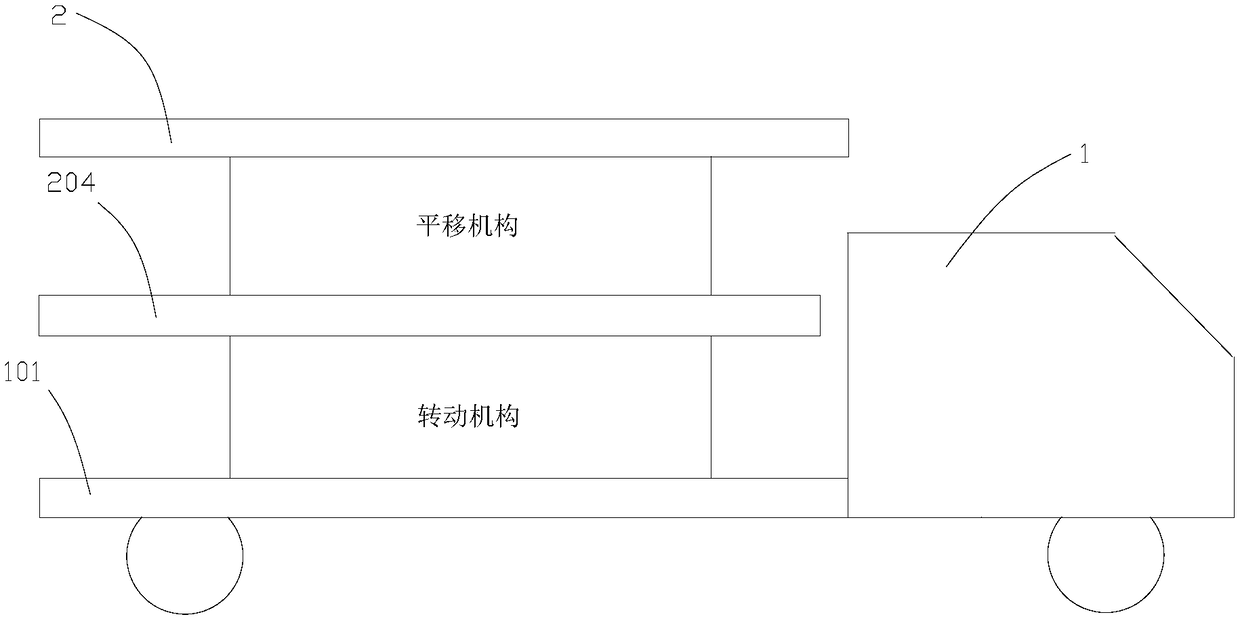
[0017] The docking method of the AGV docking platform of the present invention includes a control terminal (not shown in the figure), a rotation mechanism (not shown in the figure), a translation mechanism (not shown in the figure), a load-bearing platform 2 and a first proximity sensor 201, a second Proximity sensor 202, the 3rd proximity sensor 203, described rotation mechanism and translation mechanism are all arranged on the AGV car body 11, and described rotation mechanism is used for adjusting the rotation angle of bearing platform 2, and described translation mechanism is used for bearing platform 2 Forward or backward, the first and second proximity sensors 202 are arranged at both ends of the side wall of the load-bearing platform 2 and are electrically connected to the control terminal, and the third proximity sensor 203 is arranged on the side of the load-b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More