

Rapid calibration method and rapid calibration system for inertial motion capture attitude
A technology of motion capture and calibration method, which is applied in the field of motion capture, can solve the problems of long calibration time, decreased calibration accuracy, and long time required for calibration methods, and achieves the effect of simple and fast operation and avoiding calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
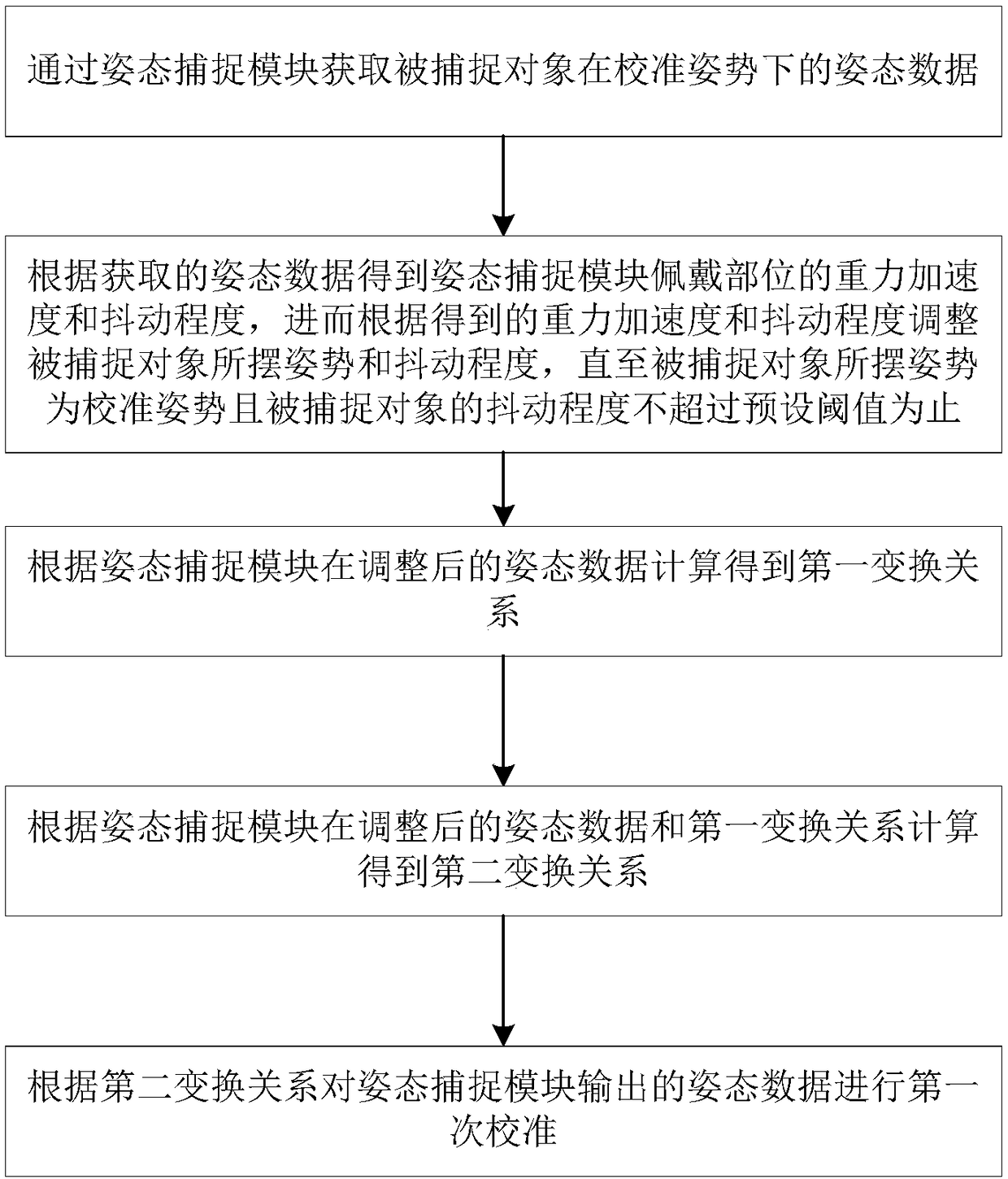
[0047] refer to figure 1 , a fast calibration method for inertial motion capture attitude, comprising the following steps:
[0048] Acquire the posture data of the captured object under the calibration posture through the posture capture module;
[0049] According to the acquired posture data, the gravitational acceleration and shaking degree of the wearing part of the posture capture module are obtained, and then the posture and shaking degree of the captured object are adjusted according to the obtained gravitational acceleration and shaking degree until the posture of the captured object is a calibration posture and is captured. until the shaking degree of the captured object does not exceed the preset threshold;
[0050] Calculate the first transformation relationship according to the adjusted posture data of the posture capture module, and the first transformation relationship reflects the transformation relationship between the geographic coordinate system and the coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More