

A real-time dynamic modeling method for manipulator joints
A dynamic modeling and dynamic modeling technology, applied in instrumentation, geometric CAD, computing, etc., can solve problems such as multi-computing performance, inability to directly apply joint real-time dynamic model, cost, etc., to support real-time, half- Physical testing and verification, the effect of removing hardware logic computing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0036] The present invention provides a real-time dynamic modeling method of a mechanical arm joint, such as Figure 9 Shown, the present invention specifically comprises the following steps:
[0037] Step 1, establishing a dynamic model of the mechanical arm joint; the dynamic model is the balance equation of motor torque and motor moment of inertia, friction and load torque;
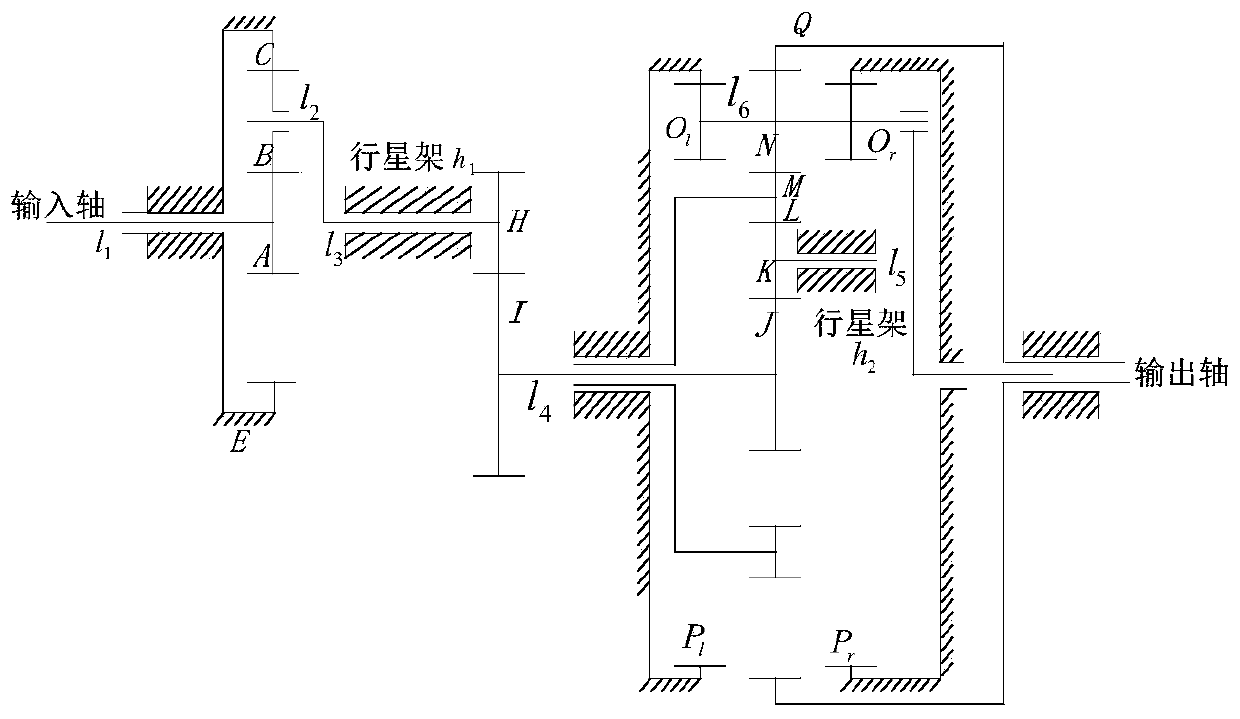
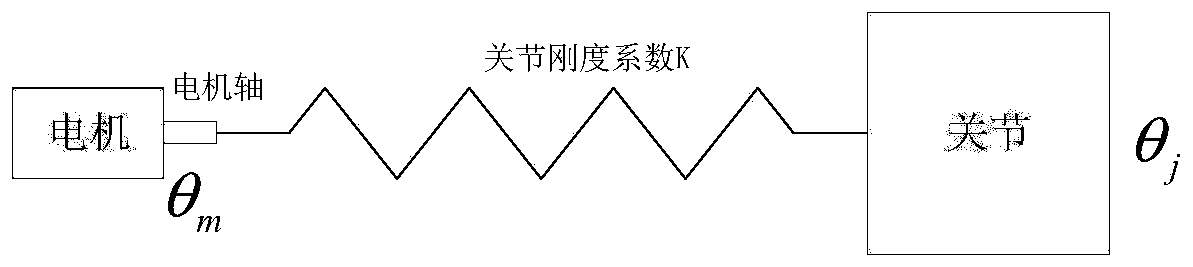
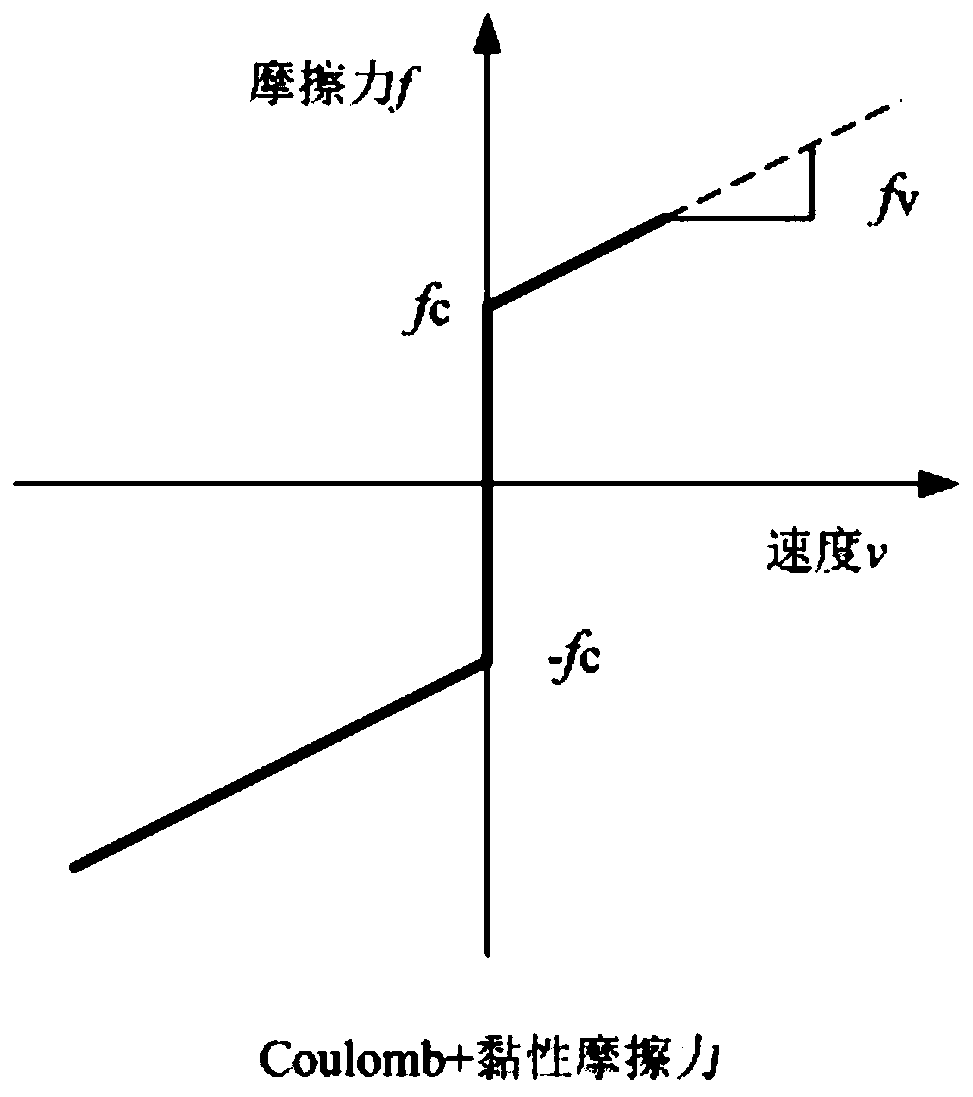
[0038] The space manipulator joint is generally composed of a multi-stage planetary gear train and a drive motor. The joint model mainly includes the joint hysteresis model, the joint stiffness model, the load influence and the joint friction model, through which the information of the motor output end is converted into the information of the joint end. The dynamic model is generally as described in formula (1), mainly including joint motor inertia, reduction ratio, current consta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More