

Lane shift early warning control method based on a 360-degree circumferential view image system
A technology of lane deviation and control method, applied in the field of advanced driver assistance systems, can solve problems such as increasing cost burden, and achieve the effect of saving hardware cost and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
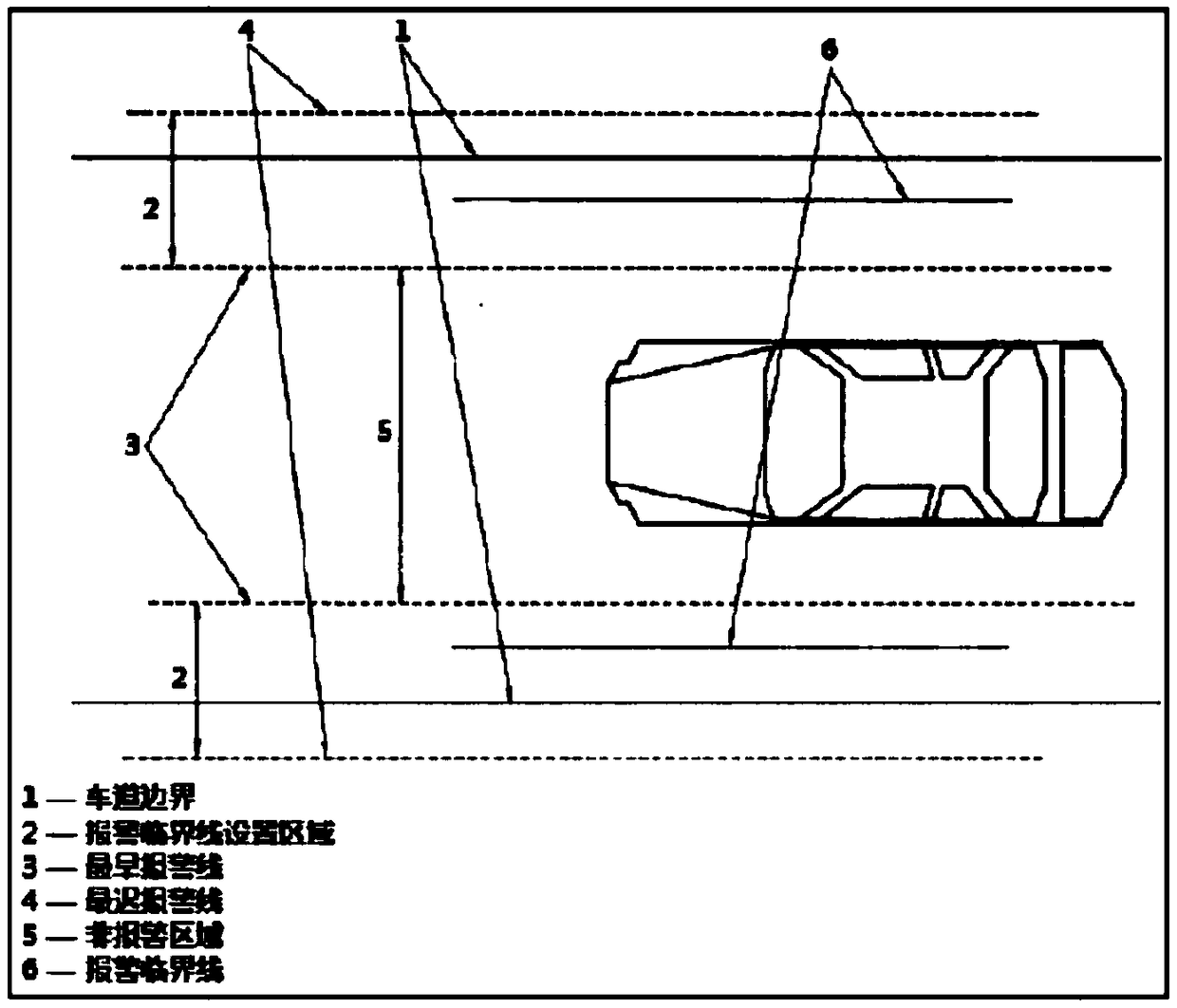
[0022] see Figure 1 ~ Figure 3 , the present invention is based on the lane deviation early warning control method of the 360° surround view image system, based on the 360° surround view image system to develop the LDW function, it is necessary to use the lane line data collected by the front camera to extract and process, and combine the operation on the vehicle The status signal analyzes the current driving situation of the own vehicle to determine whether the own vehicle is in a dangerous working condition of leaving the lane. figure 1 Schematic diagram of the alarm critical line and its setting area for lane departure warning.
[0023] Alarm strategy
[0024] The LDW function needs to judge whether the vehicle deviates from the lane according to the vehicle's crossing time (TTLC) and the vehicle's distance from the lane line (DLC), where the vehicle's crossing time refers to the time required for the front wheel center to travel to the lane line on the same side; The di...
Embodiment 2
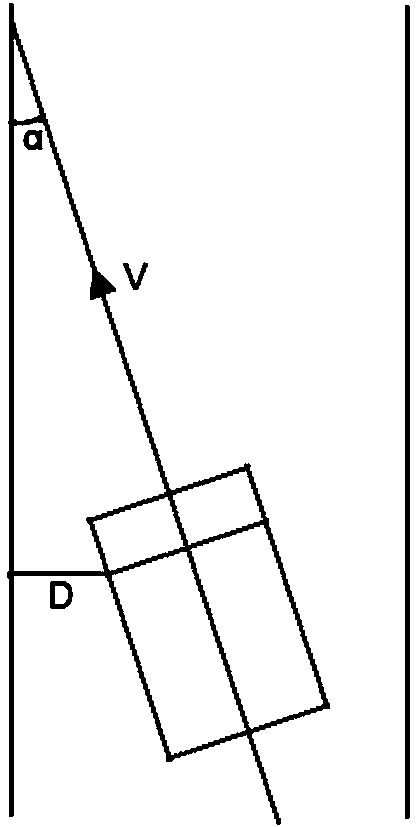
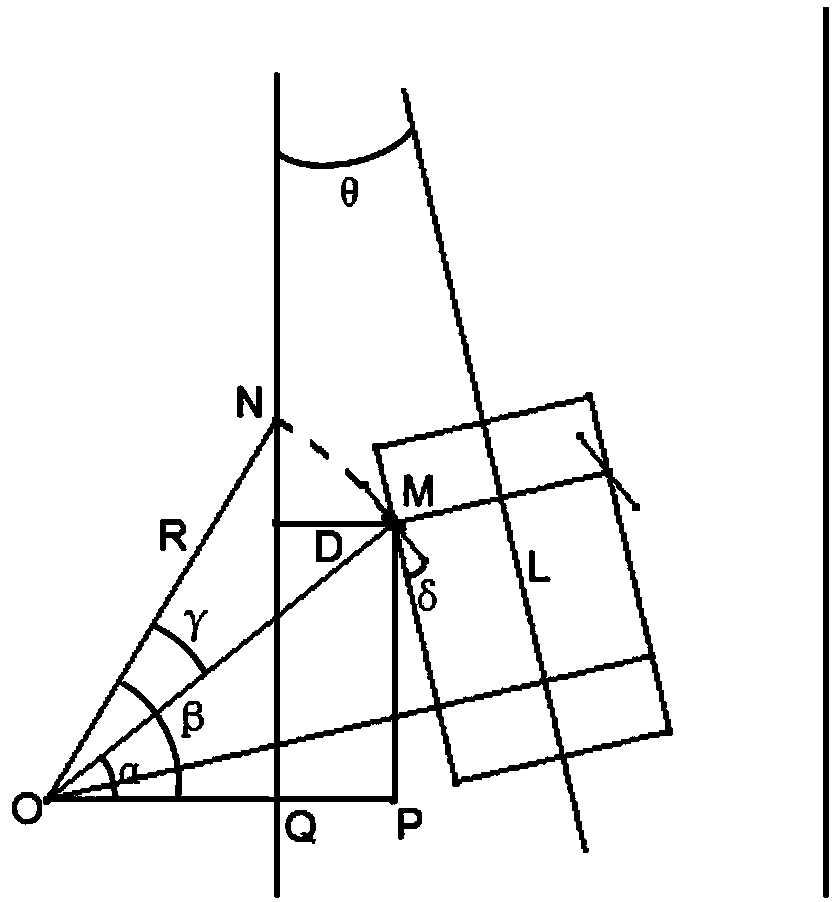
[0058] see Figure 1 ~ Figure 3 , the present invention is based on the lane deviation early warning control method of the 360° surround-view image system, judges whether the own vehicle deviates from the lane according to the time of the own vehicle crossing the boundary (TTLC) and the distance between the own vehicle and the lane line (DLC), and combines the width of the lane and other suppression Conditions comprehensively judge whether the vehicle crosses the boundary or deviates from the lane, and issues a lane departure warning after the vehicle crosses the boundary or deviates from the lane to remind the driver to control the vehicle to drive normally; among them, the self-vehicle crossing time refers to the time required for the front wheel center to travel to the lane line on the same side time; cross-border time TTLC = the distance between the center of the front wheel and the lane boundary D / lateral deviation speed V D ; The distance between the vehicle and the la...
Embodiment 3
[0060] see Figure 1 ~ Figure 3 The difference between the lane departure warning control method based on the 360° surround-view image system of this embodiment and Embodiment 2 is that: further, a fixed warning line DLC is defined, and when the self-vehicle approaches the lane line, there is no function suppression condition When the TTLC alarm condition is triggered and the TTLC alarm condition is not met, the system will trigger the alarm according to the fixed alarm line DLC, and define the narrow lane and its DLC value and the wide lane and its DLC value according to the actual lane width and width:
[0061] Narrow lane: 2.5m
[0062] Wide lane: 2.7m≤W≤4.8m, the DLC threshold is defined as 10cm; that is, whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More