A image feature fast segmentation method based on curvature analysis
An image feature and segmentation algorithm technology, applied in image analysis, image enhancement, image data processing and other directions, can solve the problem of large amount of calculation, reduce the amount of calculation, etc., and achieve the effect of good corner positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
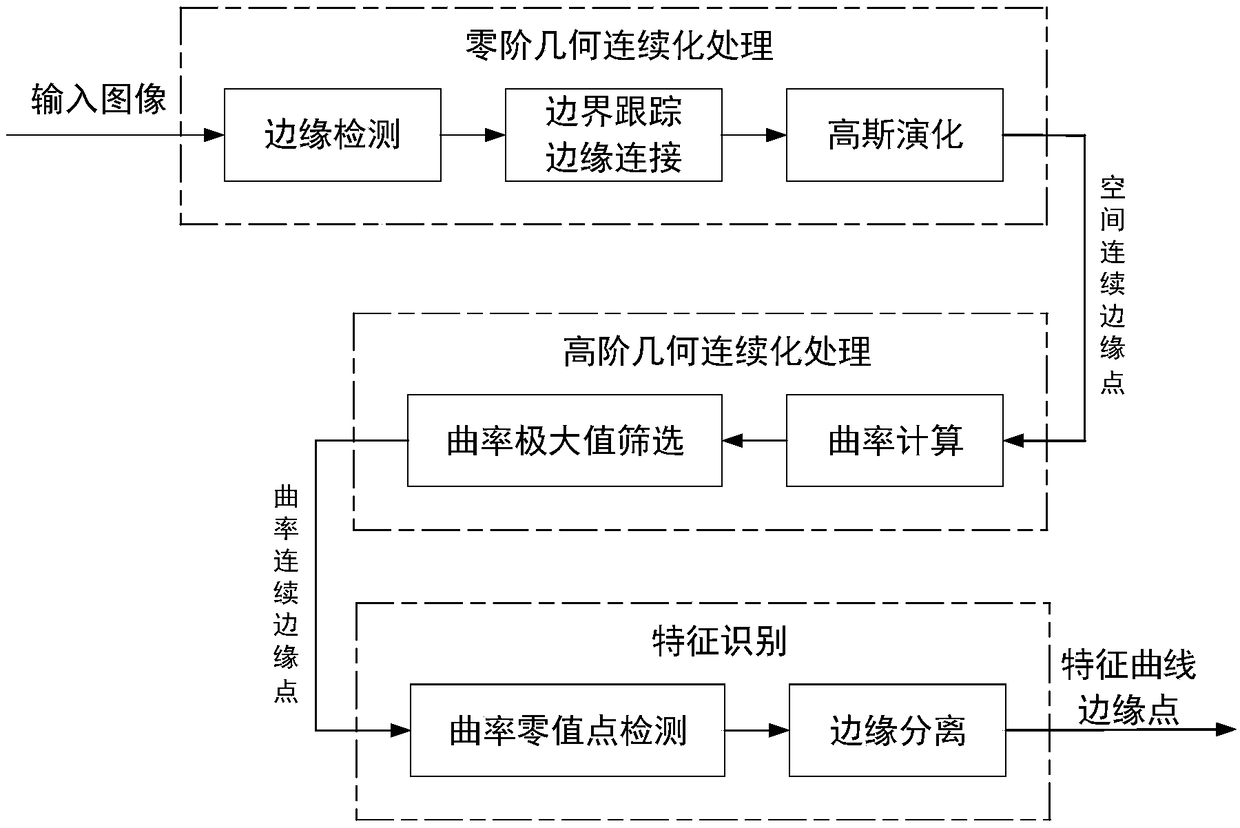
[0019] A kind of image feature fast segmentation method based on curvature analysis of the present invention will be described in detail below in conjunction with accompanying drawing and a typical specific embodiment, and this algorithm specifically comprises the following parts:
[0020] First, the zero-order geometric continuous processing is performed on the input image, and the steps are as follows:
[0021] The algorithm uses the Canny operator to perform edge detection on the image to obtain discrete edge points, and uses the 8-neighborhood boundary tracking algorithm to screen out the edge points with spatial continuity in the image, and performs edge connection and short edge removal on the continuous edges, and finally adopts The method of Gaussian evolution smoothes the continuous edge to further enhance the spatial continuity of edge points.
[0022] The discrete edge points in the image are transformed into a set of edge points with spatial continuity after zero-o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com