

A robot grinding pressure control method, system, storage medium and equipment
A technology of pressure control and robotics, which is applied in the direction of grinding/polishing equipment, metal processing equipment, workpiece feed movement control, etc., can solve the problems of electrode arm damage, uncleaning, abnormal welding process, etc., and achieve extended use Longer service life, improved grinding quality, and improved production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
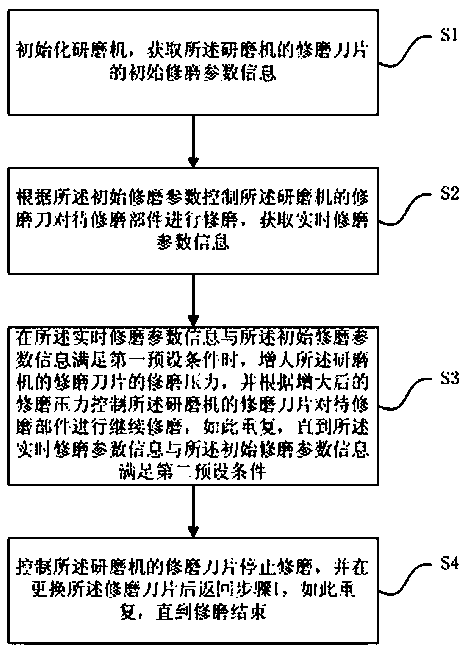
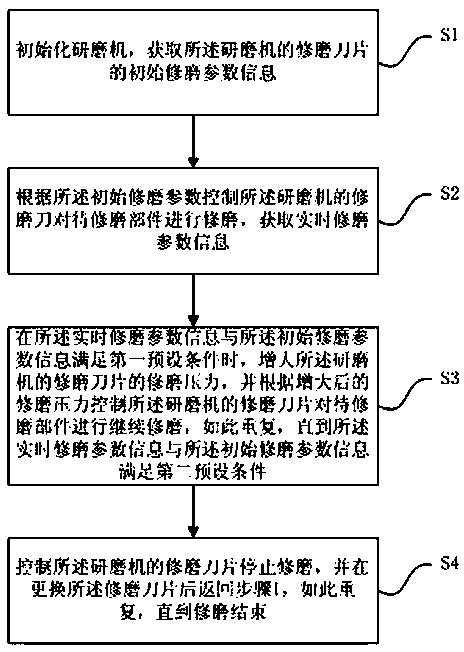
[0046] Such as figure 1 As shown, a robot grinding pressure control method includes the following steps:
[0047] Step 1: Initialize the grinding machine, and obtain the initial grinding parameter information of the grinding blade of the grinding machine;
[0048] Step 2: Control the grinding blade of the grinding machine to grind the parts to be ground according to the initial grinding parameters, and obtain real-time grinding parameter information;
[0049]Step 3: When the real-time grinding parameter information and the initial grinding parameter information meet the first preset condition, increase the grinding pressure of the grinding blade of the grinding machine, and according to the increased grinding press...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More